-
Product Listing
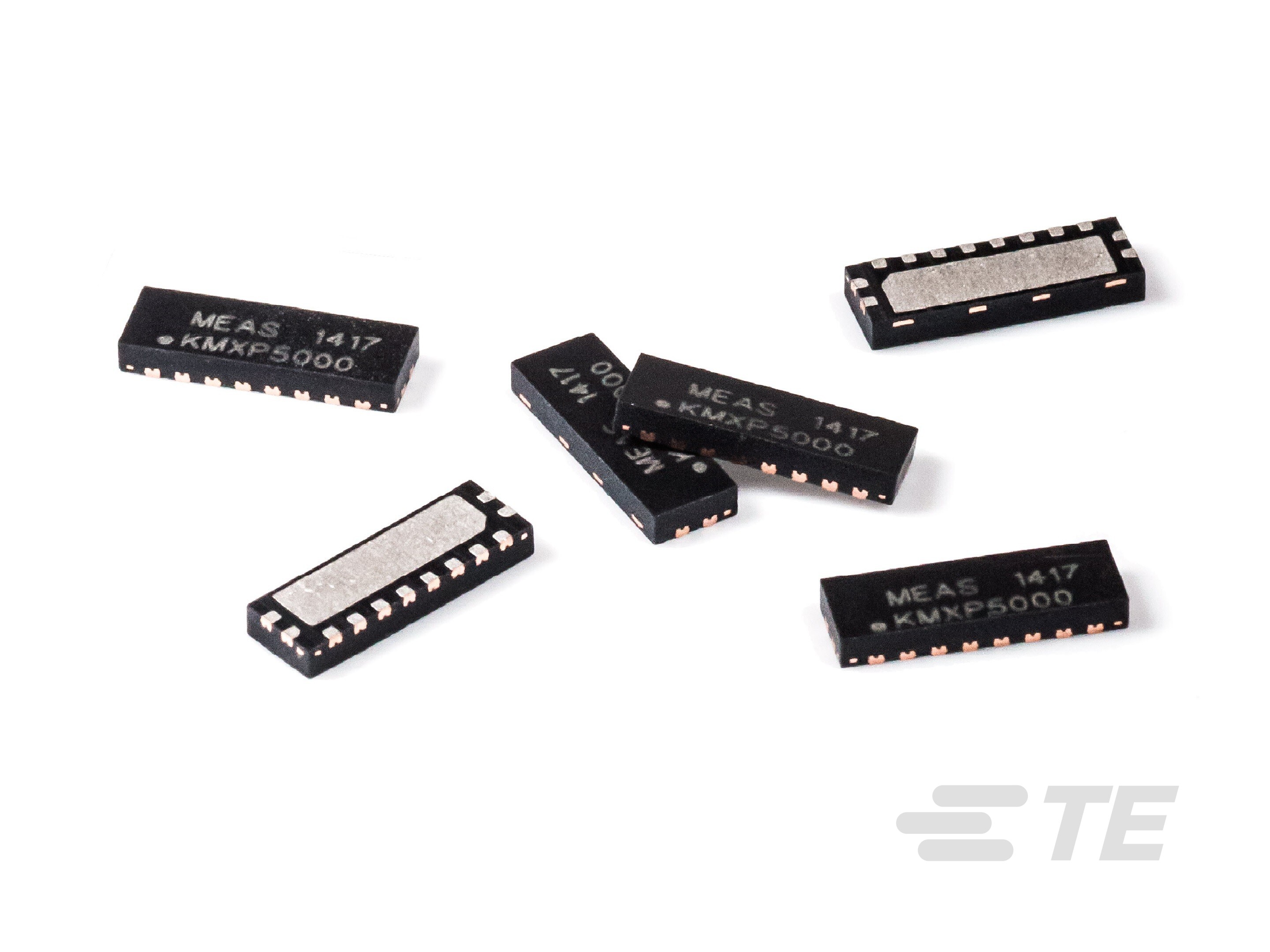
KMXP Series AMR Position Sensors
- MEAS
- MEAS KMXP
Product Features
-
Position Sensor Product Type : Magnetic Linear Position Sensor
-
Sensor Package : DFN2x6
-
Sensing Range (mm): 1 | 2 | 5
-
Typical Signal Amplitude (mV/V): 11
-
Typical Operating Voltage (V): 5
Position sensors play an increasingly important role in many industrial, robotic and medical applications. Advanced applications in harsh environments need sensors that perform well, even when exposed to oil, dirt and dust. Our KMXP position sensor is the right choice to meet those needs thanks to its magnetoresistive technology and available form factors. The KMXP sensor provides greater precision than commonly used Hall sensors and is designed to provide reliable and accurate measurements in harsh environments including high temperatures. The sensor measuring principle is based on the anisotropic magnetoresistance effect (AMR effect). The sensors are offered in two different DFN packages for multiple orientation options. These packages can be easily integrated to almost any automated assembly process.


KMXP Measurement Principle
The KMXP sensors consist of two magnetoresistive Wheatstone bridges. The resistors are placed in a such way that the characteristic magnetic field distribution of a magnetic scale with matching pole pitch produces a sine and a cosine signal output when the sensor is moved along the scale.
Key Features
- High resolution and high precision: magnetoresistive (MR) sensor with contactless measurement which provides accuracy of 10-50 µm in ranges between 1 – 5 mm.
- Easy assembly: DFN2x6 package is ideal for any PCB assembly processes.
- Tape & Reel packaging for easy integration
- Design freedom: perpendicular or flat soldering versions and a small sensor wall thickness for large application air gaps.
- Superior performance: up to 150°C, EMC proof in any dirty environment and insensitive to dirt, oil or dust.
Applications
Contactless linear or angular position measurement for applications:
- Industrial machinery, such as sawing or drilling equipment
- Medical high precision mechanical controls like bed control, advanced prosthesis steering, precision catheters, X-ray equipment, syringe pumps
- Robotics in industrial automation
Position sensors based on the magneto resistance effect combine high precision with cost effectiveness for linear displacement measurements. The contactless measurement principle offers clear advantages versus optical encoder systems in harsh environments. Coming from applications with medium accuracy demands but high mechanical tolerances, the whole spectrum of displacement tasks down to nanoscale measurements can be solved with scale based magneto resistive sensor systems. Embedded in a small, modern DFN package for standard, flat or perpendicular mounting, the linear magneto resistive sensors can now easily be applied to a wide range of applications with small design space using standard SMT assembly processes.
Please review product documents or contact us for the latest agency approval information.
Product Type Features
-
Position Sensor Product Type Magnetic Linear Position Sensor
-
Sensor Package DFN2x6
Electrical Characteristics
-
Typical Operating Voltage (V) 5
-
Typical Average Current (mA) 1.5 | 3
Usage Conditions
-
Sensing Range (mm) 1 | 2 | 5
-
Operating Temperature Range -40 – 150 °C [ -40 – 302 °F ]
Operation/Application
-
Typical Signal Amplitude (mV/V) 11
Datasheets & Catalog Pages
- KMXP Series Data Sheet English