-
Overview
Cobot Torque Sensor
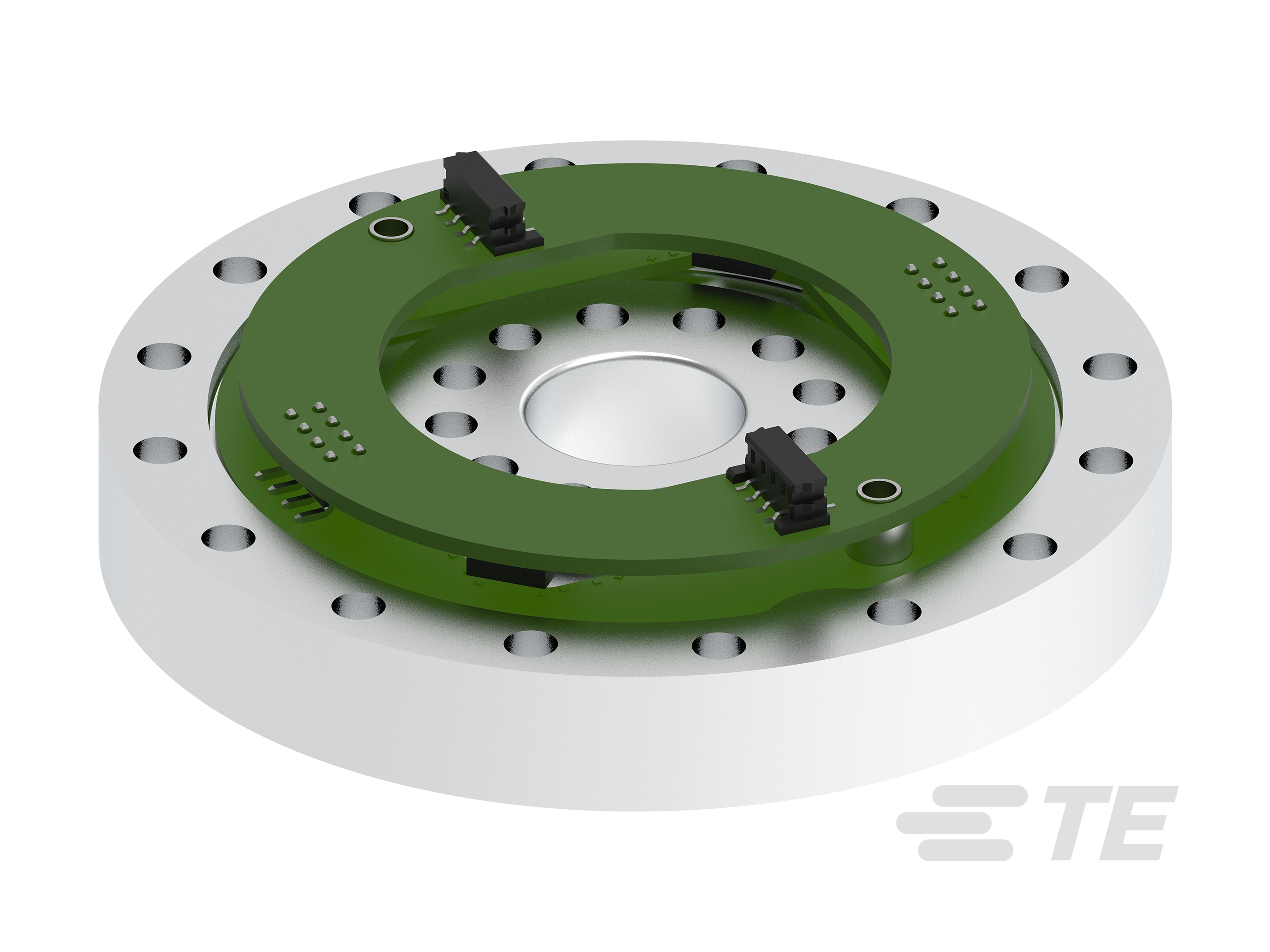
The demand for collaborative robots is growing fast, but these robots or Cobots must also work safely alongside humans. TE Connectivity (TE) has a solution to provide functional safety in the next generation of human-robot collaboration with increased accuracy and speed. TE’s ring-shaped safety torque sensors are designed to be integrated at each Cobot joint, meeting the new level of safety requirements up to ISO13849 Category 3 PL d. Optimized for collaborative robots the sensor provides low susceptibility to crosstalk allowing increased accuracy. With available customized mechanical interfaces the sensor can be easily adapted to meet specific customer application requirements. With a standard I2C digital interface the sensor allows easy integration. The safety torque sensor incorporates proven Microfused sensing technology with excellent long-term span and zero stability.
ORDERING INFORMATION
Please refer to the Cobot Torque Sensor datasheet for a detailed list of standard and custom part specifications. Please enter your custom design requirements in the fields below.
Standard Specifications
- Overload: ±300% of nominal torque range
- Structural Torque: ±500% of nominal torque range
- Non-Linearity: ±0.25% FS maximum
- Hysteresis: ±0.25% FS maximum
- Resolution: 0.025% FS maximum
- Temperature: 0°C to +85°C compensated range. -40°C to +105°C operating range.
- Overall accuracy: ±1.5% FS typ. including non-linearity, hysteresis, span setting and thermal drifts.
- Channel difference: ±2% FS typ. including non-linearity, hysteresis, span setting and thermal drifts
- Power supply: 5 Vdc ± 0.15 Vdc typ.
- Current consumption: < 10 mA per channel
- Electrical interface: I²C
- Digital output: 16 bit output register
- Bandwidth: 1000 Hz minimum
- Communication rate: I²C 400 kHz maximum

Applications
- Safety critical collision sensing in collaborative robots
Benefits
High functional safety
Low susceptibility to cross loads
Customizable mechanical interface
Digital I2C electrical interface
Innovative microfused technology
Trend Paper
-
Improving Safety Performance in Cobots with Torque Sensors (English)
As Industry 4.0 evolves, the use of more sophisticated robots is growing. This paper explores the shift from using power limiting systems to using torque sensors in collaborative robot applications.
Infographic
-
Five Ways Torque Sensors Help Improve Safety Performance in Cobots (English)
Designed for integration at each cobot joint, this infographic explores the five ways TE safety torque sensors are improving performance in the next generation of human-robot collaboration.
Frequently Asked Questions
Q: What safety standard does the saftey torque sensor comply with?
A: ISO 13849 Category 3 PL d.
Q: What is the typical accuracy of the saftey torque sensor?
A: ±2%
Q: What is the nominal overload of the saftey torque sensor?
A: ±300%
Q: What is the electrical interface method of the saftey torque sensor?
A: I²C serial digital
Q: What are the available torque ranges of the saftey torque sensor?
A: 20Nm to 500Nm
Please review product documents or contact us for the latest agency approval information.
Detailed product features are not currently available online.
Datasheets & Catalog Pages
- Torque Sensors Cobots Product English
Microfused is a trademark.