
ホワイト ペーパー
無人システムの将来
UUV や USV に信頼性の高い電力供給を行う上で、船舶環境には圧力、浸水、腐食など特有の課題があります。TE の接続ソリューションは、これらの課題に対応できるように設計されています。
著者:
Gregory Powers、Global Aerospace, Defense & Marine 部門、元市場開発マネージャGreg はすでに TE を退職しています。
ロボット分野は、海、陸、空そして宇宙のすべての環境を網羅します。 無人システムと言えば、無人航空機 (UAV) や宇宙探査機、惑星ローバーなどがよく知られています。UAV には限らず、無人潜水艇 (UUV) や 無人水上艇 (USV) なども警備と防衛に関連して注目を集め始めています。同様に、無人陸上車両 (UGV) も脚光を浴びています。米海軍ではヒューマノイド ロボット (SAFFiR) を戦艦の射撃第一応答者とした実験も進められています。
ほとんどの UAV には軽量データ リンクが使われており、受信ステーションとのリアル タイム通信を妨げる環境はありません。
これらの無人システムは、機械が人の力を増強するか、人に代わることができる環境とエコシステムにおいて活動することを目的としています。 理由としては、安全性、環境問題、技術的優位性、コストなどが含まれます。無人機を使用すれば有人機よりも、危険性およびコスト面で有利になります。仕様要求は電気と機械の技術を進化させ、ロボットの活躍場所を創り出し、これらのソリューションは通常から最先端までの広い範囲に及んでいます。それぞれの任務に応じた注目すべき技術的や経済的な対応策があり、それに基づいて技術者は特定の接続ソリューションを選択します。
UAV - SWaP と通信帯域幅
肩式発射であろうが携帯式発射であろうが、UAV は SWaP (サイズ、重量、電力) 通信帯域幅がすべてです。 接続ソリューションを含む軽量構造は、負荷、領域、滞在時間を最大にするために最も重要です。監視や類似用途では高速信号処理が重要であるので、UAV では他の無人機に比べて通信帯域幅をより有用に扱います。ほとんどの UAV には軽量データ リンクが使われており、受信ステーションとのリアル タイム通信を妨げる環境はありません。 このような環境では、軽量、大容量配電装置は UAV に有益です。電線とハーネス部品は以前から軽量化が進んでいます。電子架橋された絶縁被覆とジャケット材質により肉厚が著しく薄くなり、省スペース化と軽量化を実現しています。数グラムの重量も重要であるため、TE Connectivity (TE) では、交換可能な部品を最大 20% まで軽くした軽量型熱収縮ブーツを最近発売しています。多くの場合、光ファイバ接続は軽量、高周波数帯域、EMI 対策不要の実証として使用されてきています。
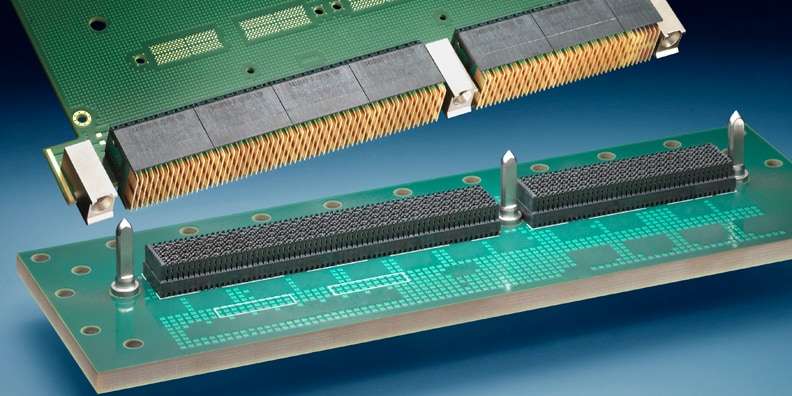
画像および無線諜報の特定処理により、UAV は受信ステーションに送信すべきデータを区別し、優先順位を決めることができます。 高速埋め込み型コンピュータには、高度な処理が必要となります。TE の VITA 46 VPX スタンダード MULTIGIG RT 2-R バックプレーン コネクタ (図 1) は、この役割に最適です。オープン アーキテクチャの VPX コネクタは、モジュール式で用途の柔軟性に応じて拡張が可能であり、10 Gb/s を超える優れた機能密度が実証されています。UAV の設計者は、複合材エンクロージャとアンテナを一体構造にできる、複合材と選択的金属被覆の進歩の恩恵を受けています。
UGV - 堅牢なコスト低減
UGV の設計は伝統的にコスト削減が最優先されてきました。 理由としては、通常の場合は大量生産で、地上の自然環境という問題性の低い点と、しばしば UGV が消耗品とみなされるという事柄が挙げられます。それでも、UGV は必要とされるときに堅牢で機能することが期待されており、設計者はコストと性能の間の微妙な境界線を踏みはずさないように努力しています。 UGV は、カメラやセンサが搭載された小型の安価なローバから、高性能の多機能システムまでさまざまです。これらの幅広いプラットフォームを考えると、接続ソリューションは商用、産業用、または自動車用コネクタからミリタリ規格のコネクタまで多岐に及びます。いずれにしても、接続ソリューションは、用途に適合するよう適切に設計されていなければなりません。
装輪車両やトラックなどの物流支援車両は、有人または無人モードのどちらでも操縦できるように設計されつつあります。
その一端には、比較的基本的で低コストな使い捨て可能なシステムがあります。 装輪車両やトラックなどの物流支援車両は、有人または無人モードのどちらでも操縦できるように設計されつつあります。これらの車両には、耐候性の自動車用コネクタ、IP67 入出力コネクタ、ミリタリ仕様またはミリタリ スタイルの丸型コネクタを使います。 MIL-DTL-38999 コネクタおよびその製品ファミリは、堅牢な相互接続に対応する最も一般的な選択肢のひとつです。ミリタリ仕様のコネクタの他には、多くの種類のコネクタは基本的に 38999 コネクタ ファミリのシェルが使われています。新世代のミリタリ スタイル COTS 丸型コネクタが UGV に理想的です。たとえば、TE の Wildcat Micro と 38999 コネクタは、ミリタリ用丸型コネクタ設計の実践に基づいています。3 ~ 9 コンタクトの Wildcat Micro バイオネット ラッチ機構は非常に堅牢で、迅速で確実な結合が可能です。また、耐振性を備えた三条ネジ付きオプションをはじめ、各種取り付けオプションと後部付属品も用意されています。

MIL-DTL-38999 を基に、Wildcat 38999 コネクタには 11 ~ 64 コンタクトで 4 種類のハウジング サイズが用意されており、従来の 38999 コネクタの約 2 倍のコンタクト密度を実現しています。 三条ネジ結合は、苛酷な衝撃や振動に耐える堅牢で信頼性の高い嵌合を実現し、全天候や任務中の水中使用にも耐えうる完全密閉型コネクタです。堅牢と高密度の他には、多くのセンサ システムが需要周波数帯域に見られます。TE の CeeLok FAS-X コネクタは、38999 シェルで 10 Gb/s の Ethernet に対応し、サイズ 11 のシェルに Ethernet 1 チャネル、サイズ 25 のシェルに 4 チャネルを収容します。38999 派生コネクタの利点のひとつは、容易に入手できる同じバックシェルと他の付属品が利用できることです。
UUV - 環境課題
船舶環境には、とりわけ海中圧力に対する耐性、浸水環境での作動、食塩の誘発性腐食に対する保護など、特有の課題があります。 電子機器はたいてい格納容器または交換ラインユニット (LRU) に収納されています。流体力学の影響については、速い前進速度で運用される UUV は、正面断面積が最小限になっているかもしくは魚雷形状になっており、その点から省スペースは大変重要な要素です。海中における性能の必要性と同様に、省スペース、重量軽減、高密度集積、それらはしばしば合相反します。それを前提として実装課題を考える場合、TE のドライ嵌合方式の SEACON MINI-CON の小型形状で堅牢なコネクタは UUV 環境に最適です。TE の SEACON MINI-CON コネクタは、小径で高密度な高水圧システムとして開発されており、シェル サイズ 13 種類あり最大 203 コンタクトまで用意されています。標準コネクタは 16,000 psi の水圧に耐えるように設計されていますが、さらに高い水圧用コネクタも取り揃えています。

ウェット嵌合コネクタは、両方の水圧バランスと嵌合していないときのコンタクトを密封しなければならない機構から、大型になる傾向があります。 水中環境において、UUV のコネクタをロボット操作で正しく嵌合させるには、引き込み線が必要になります。ウェット嵌合コネクタは長年にわたり海中の石油生産で使用されているので、UUV の水中ドック システムなどの船舶用途にも使えます。 自律型潜水艇にはまだ開発の余地が残されています。石油ガス用途に使用されている遠隔操作無人機は、長いアンビリカル ケーブルを通じて電力、制御、データを直接制御されています。アンビリカル ケーブルの中の電源線と光ファイバ ケーブルは、十分な電力と周波数帯域幅を提供します。しかしながら、ケーブル方式の遠隔操作無人機 (ROV) の自由度とステルス性の範囲は、防衛用途では問題になる可能性があります。
海、陸、空、宇宙それぞれの環境には異なる障害があり、無人システム設計に重大な影響を与えています。
ケーブル方式ではない自立的運転には、通信や電力供給などの問題があります。 水中機は UAV や UGV と同じように、便利な無線通信機能は持てません。水は RF 信号をよく通しません。音響通信や低周波曳航アンテナではある程度の通信は可能ですが、より大きなデータ 負荷には効率的ではありません。音響信号の一般的な用途は、単に UUV に浮上を伝える通信手段です。浮上した UUV には、近くの船舶や衛星との明瞭な通信機能があります。このような通信の問題のため、多くの UUV は積極的な内部信号処理を行いません。UAV は高解像度の写真やビデオを含む大量の信号処理を好まず、UUV の通信処理はより控えになります。埋め込み型コンピュータが水や圧力から厳重に保護されていれば、UAV や UGV が受けるような衝撃や振動がない場合において、その運転環境は比較的安全です。COTS 埋め込み型コンピュータ システムは、必要とされる処理能力の機械的および環境的な堅牢性を兼ねそろえています。保護された環境と UUV の他の環境間には、防水型コネクタが必要です。 UUV の電源は通常バッテリです。最新のバッテリ技術、効率的な配電、そして低消費電力のシステムは、任務の成功に不可欠です。SWaP を最小限にすることは、無人システム設計における共通のテーマです。
無人化する世界
センサ、ソフトウェア、コンピュータ処理技術の進化に伴い、無人ロボット システムの有効性と存在価値は高まります。一つ変わらないのは、無人ロボット システムが直面する環境課題です。海、陸、空、宇宙それぞれの環境には異なる障害があり、無人システム設計に重大な影響を与えています。これらの課題範囲は、材料選択などの最も基本的なものから、必要とされる自立性のレベルなどの高度なものまで多岐にわたります。同様に、設計者による接続の役割やソリューションの範囲は、無人システムの環境の影響によります。相互接続の科学は形態と機能を併合することから、接続の役割は無人システム設計の未来ではますますその重要性を増していきます。