カスタマイズされたスケーラブルな視覚誘導製品
要約
本ホワイトペーパーでは、再現性、拡張性、購入しやすさ、使いやすさを特長として、あらゆる水準のユーザーにお勧めできる視覚誘導製品の 1 つを紹介します。必要なアクションを実行するために実行ユニットを目的の位置に誘導することを目的とした視覚誘導は、インダストリアル自動化製造用途で広く使用されています。再現性のある当社製品は 1 つの標準製品であって、当社で開発した後はお客様が開発する必要はありません。視覚誘導で重要なコンポーネントはマシン ビジョン アルゴリズムです。手ごろな価格の当社製品には、カスタマイズ済みで全面的に自社開発のマシン ビジョン アルゴリズムが用意されているので、何らかの市販製品を購入する必要がなく、マシン ビジョン製品のコストを大幅に低減できます。同時に当社のマシン ビジョン プラットフォームは、市販製品をしのぐ性能を備えています。当社のスケーラブルな製品は、お客様の要件に応じてさまざまな視覚誘導用途に対応できます。使いやすい当社製品は、優れた使い勝手を備えたスマート カメラのように機能するので、マウスでドラッグしてクリックするだけで視覚誘導用途に迅速に配備できます。この製品は、UR 社製ロボットや EPSON 社製ロボットをはじめとする数種類のインダストリアル ロボットで視覚誘導を実行して検証しており、良好な試験結果が得られています。
問題の提示
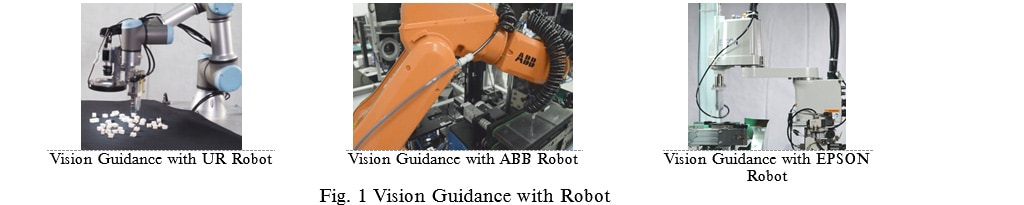
インダストリアル自動化製造のマシン ビジョンに対する応用技術として、視覚誘導は最も広く知られているもののひとつです。理論上の視覚誘導は、必要なアクションを実行するために実行ユニットを目的の位置に誘導することを目的としています。実行ユニットとしてロボット、シリンダ、モータなどがあり、必要なアクションとしてピックアンドプレース、はんだ付け、組み立てなどがあります。図 1 に示すように、自動化では視覚誘導ロボットが広く使用されています。ロボットが目を持ったかのように、視覚誘導によってロボット動作の確度が大幅に向上し、ロボットの応用範囲が広がります。
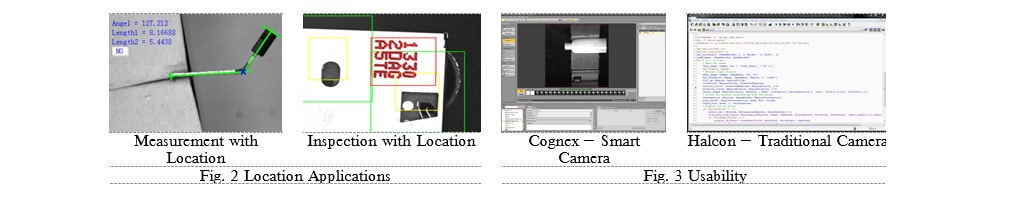
視覚誘導の応用を実現するには、マシン ビジョン技術として a) 物体位置認識、b) 校正、c) 通信が必要です。このような視覚誘導技術は、インダストリアル分野でも広く使用されています。図 2 に示すように、ここでは検査用途で物体位置認識技術を使用します。普通は、検査を実施する前に物体位置認識アルゴリズムを使用して対象物の位置を特定する必要があるからです。同様の理由から、寸法測定用途でも物体位置認識を使用します。したがって、視覚誘導は、最も広く普及しているインダストリアル マシン ビジョン技術であるといえます。
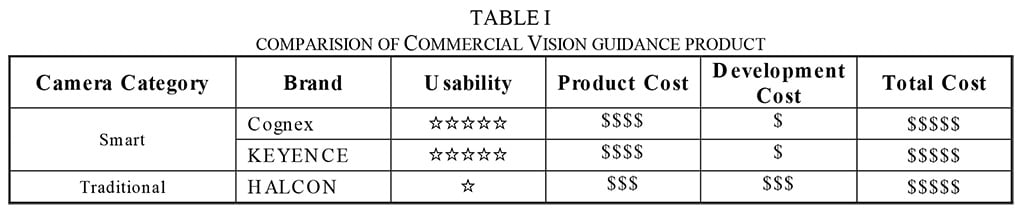
視覚誘導を実行する製品がいくつか市販されていますが、それらは 2 つのグループに大別できます。1 つはスマート カメラを使用した製品で、もう 1 つは従来のカメラを使用した製品です。スマート カメラを使用するグループの代表的な製品は Cognex と Halcon が提供しています。従来のカメラを使用したグループの代表的な製品は Halcon が扱っています。表 1 は、このような種類のマシン ビジョン製品のコストをまとめたものです。スマート カメラは、使い勝手に優れ、開発コストも少なくてすみますが、製品コストは高くなります。従来のカメラは、製品コストは少なくてすみますが、使い勝手は悪く、開発コストも高くなります。図 3 は、主にマウスのドラッグとクリックの操作で使用するスマート カメラを示しています。従来のカメラで高度なプログラミングを実行するには専門のエンジニアが必要になります。したがって、どちらの種類の製品でも合計コストは高くなります。また、スマート カメラでも従来のカメラでも、視覚誘導機能を使おうとするとすべてのアルゴリズム パッケージを購入する必要があり、これも高コストの原因となります。
お客様のニーズと市販製品とのギャップを埋めるには、カスタマイズした視覚誘導製品が必要です。その開発には次のような課題があります。
- 自社開発のマシン ビジョン アルゴリズム: 市販の視覚誘導製品のコストが高くなる原因は、マシン ビジョン アルゴリズムにあります。システムのコストを削減するには、市販のマシン ビジョン ライブラリを購入することはできず、アルゴリズムを自社開発する必要があります。これは、イノベーションによって当社製品の中核的な能力を生み出すことです。
- 競争力のある性能を備えながらも低コスト: コストが低くても、性能が劣る製品ではお客様に受け入れていただけません。したがって、当社自社開発のマシン ビジョン アルゴリズムは、市販製品をしのぐ性能を備えている必要があります。
- さまざまな種類の誘導用途に合わせて構成できる機能: スカラ ロボット、6 軸ロボット、シリンダ、モータなどのさまざまな実行ユニットを誘導する必要があるので、多彩な用途の要件に応じてユーザが構成できる製品を 1 つのシステムで実現する必要があります。
- オペレータによる操作との親和性: スマート カメラ同様の使い勝手を提供する製品にする必要があります。
- 生産ラインで稼動できるインダストリアル水準の品質: 低コストであっても、製品品質が低下することは許されません。
- デジタル工場をサポートできる潜在的能力の装備: TE にとってデジタル工場は重要であり、興味を持たれるお客様が数多く存在します。したがって、ネットワークに接続して情報交換ができる能力を検討する必要があります。
当社では、構成可能でカスタマイズ済みの視覚誘導ソリューションを開発しました。視覚誘導に使用するすべてのマシン ビジョン アルゴリズムをすべて自社開発し、市販製品はまったく購入していないので、システムのコストを大幅に削減できました。当社のシステムは市販製品に匹敵する性能を備えています。さまざまな用途に合わせて構成を変更できる製品を提供します。このソリューションはスマート カメラ同様の操作方法を採用しているので、ユーザー側ではマウスのドラッグとクリックの操作だけでソフトウェアを構成して、視覚誘導を応用できます。この当社製品は、UR 社製ロボットや EPSON 社製ロボットをはじめとする数種類のインダストリアル ロボットで視覚誘導を実行して検証しており、良好な試験結果が得られています。市販製品とのコスト比較では、1 セットあたりのコスト削減額は約 5,000 米ドルであり、考えられる配置先を 200 か所以上と想定すると、この技術によるコスト削減額は 100 万米ドル以上にもなります。
解決方法と結果
AMT 視覚誘導製品
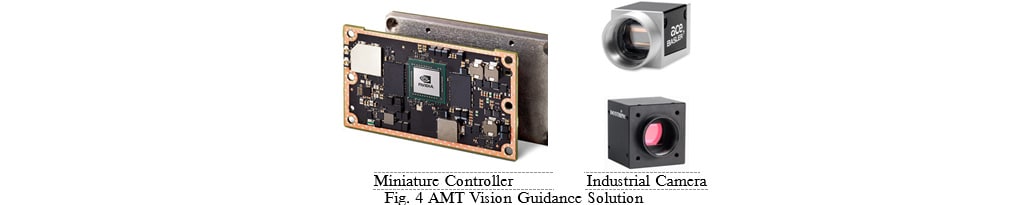
当社の製品は、視覚誘導用途のすべてのソリューションを提供します。図 4 に示すとおり、当社製品のパッケージはソフトウェア、小型コントローラ、および 2 メガピクセルのインダストリアル カメラで構成されています。カメラを使用して画像を取得し、その画像をソフトウェアで処理して結果をフィードバックできます。小型コントローラは、ホストとしてソフトウェアを実行できます。
システム全体の中心はソフトウェアです。このソフトウェアは、カスタマイズしたマシン ビジョン アルゴリズムと統合されているだけではなく、構成可能な動作をユーザーに提供します。すべてが完備したソリューションをユーザーに提供するために、カメラとコントローラも同梱しています。お客様がカメラとホストの選定に時間を費やす必要はありません。
ソフトウェアの構造と機能
構成可能なソフトウェアの開発は複雑なプロジェクトです。したがって、当社ではまず図 5 に示すソフトウェアの概念構造を作り上げました。この構造は 3 層から成り、各層はその上層のみにサービスを提供し、下層からサービスを受けます。機能モジュールは各層で特性が設定されています。各層の堅牢性を引き上げるために、各層の機能モジュールは、そのモジュールに関連するエラー処理も扱います。
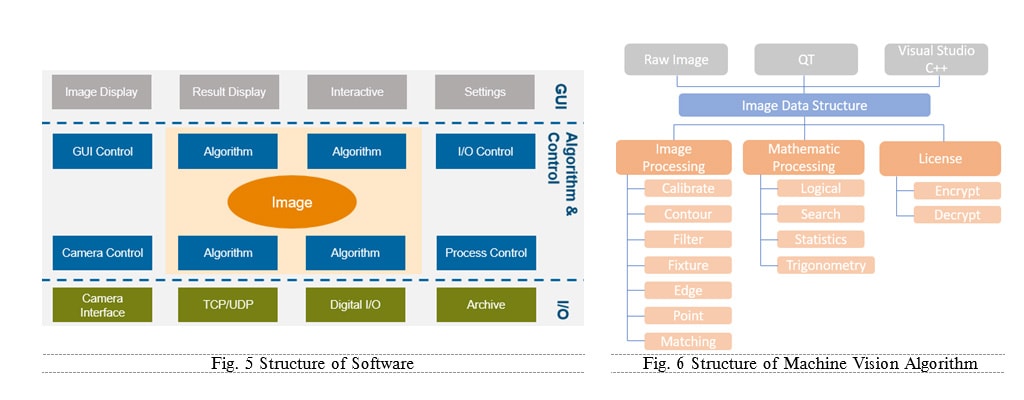
最下層は、ソフトウェアと環境との通信を扱う入出力 (I/O) 層です。ここには 4 つの機能モジュールがあります。カメラ インタフェース モジュールは、カメラのトリガー、画像の取得、カメラのパラメータの読み取りと設定に使用します。TCP/UDP モジュールは、TCP/UDP プロトコルに対応したデバイスとの通信を可能にする TCP プロトコルと UDP プロトコルを実装します。現在のところ、ほとんどすべてのインダストリアル ロボットが TCP/UDP プロトコルに対応しています。デジタル I/O モジュールは、従来のデジタル I/O を通じた通信ができるようにします。アーカイブ モジュールは、画像、システム ログ、プログラム レシピ、検査結果などの情報のアーカイブ化に使用します。
中間層はアルゴリズム&制御層です。I/O 層からの画像を受け取り、所要の処理を実行して I/O 層と GUI 層にフィードバックします。この層では、ソフトウェア全体の論理制御も扱い、各層間の複雑なタスクをスケジュール設定します。
最上層は GUI 層です。画像と結果の表示に使用するほか、双方向の操作によってユーザーがこの層でソフトウェアの設定を調整できます。
マシン ビジョン ライブラリの構造と機能
アルゴリズム&制御層には、自社開発のマシン ビジョン アルゴリズム ライブラリが組み込まれています。このライブラリの構造と機能を図 6 に示します。マシン ビジョン ライブラリが持つ 2 つの主要機能として、画像データの表現と画像の処理があります。
ライブラリによる画像表現は、コンピューターの物理メモリに画像データを読み書きする効率に影響します。したがって、マシン ビジョン アルゴリズムの効率が大きな影響を受けます。たとえば、2 メガピクセルの画像データを読み取るとき、このアルゴリズムではピクセルの読み取り処理を 200 万回実行することになります。各アルゴリズムでは画像データを数回読み取ることが普通であるため、画像表現のパフォーマンスが不足すると、アルゴリズムの効率が著しく低下します。当社製品の画像表現を試験したところ、良好な表現処理の速度は、パフォーマンスが低下した表現処理よりも 3 倍以上高速です。
I/O 層にある画像データには、当社で定義した画像表現がありません。通常、I/O 層のデータ形式には、カメラから得られた未加工画像データ、QT 形式 (Qimage)、Visual Studio C++ 形式 (Cimage) の 3 種類があります。したがって、当社では、得られた画像データを指定の画像表現に変換する形式変換アルゴリズムを特別に提供しています。
画像処理アルゴリズムに関しては、主要な関数モジュールとして、画像処理ライブラリに 1) 画像処理、2) 数理処理、3) ライセンスの 3 つが用意されています。
1.画像処理: カスタマイズしたマシン ビジョン アルゴリズムを備えたモジュールです。このモジュールには、視覚誘導に関するアルゴリズムがいくつかのサブグループでグループ化されています。これらの各サブグループで、それぞれのタイプの画像処理アルゴリズムを扱っています。たとえば、物体位置認識のサブグループではテンプレート照合のアルゴリズムを提供し、校正のサブグループではキャリブレーション機能に関するアルゴリズムを提供しています。
2.数理処理: 画像処理アルゴリズムの基本は数理演算であり、このライブラリで頻繁に使用されます。したがって、当社では、マシン ビジョン ライブラリ内部で高効率なマシン ビジョン ライブラリを実現しました。このモジュールには 4 つのサブグループがあり、たとえば、三角法のサブグループには、三角法の値を計算するアルゴリズムが用意されています。検索のサブグループでは、数種類のルックアップ アルゴリズムを提供しています。
3.ライセンス: この自社開発アルゴリズムは TE の知的財産であり、とりわけ暗号化と復号化の機能を提供して製品の承認を管理しています。
考察および要点
本ホワイトペーパーでは、再現性、拡張性、購入しやすさ、使いやすさを特長として、あらゆる水準のユーザーにお勧めできる視覚誘導製品の 1 つを紹介します。この当社製品は、UR 社製ロボットや EPSON 社製ロボットをはじめとする数種類のインダストリアル ロボットで視覚誘導を実行して検証しており、良好な試験結果が得られています。
謝辞
埋め込み型マシン ビジョン システムに関する様々な情報および技術をご提供いただいた Mr. Josef Sinder 氏に、筆者一同、心より感謝いたします。
カスタマイズされたスケーラブルな視覚誘導製品
要約
本ホワイトペーパーでは、再現性、拡張性、購入しやすさ、使いやすさを特長として、あらゆる水準のユーザーにお勧めできる視覚誘導製品の 1 つを紹介します。必要なアクションを実行するために実行ユニットを目的の位置に誘導することを目的とした視覚誘導は、インダストリアル自動化製造用途で広く使用されています。再現性のある当社製品は 1 つの標準製品であって、当社で開発した後はお客様が開発する必要はありません。視覚誘導で重要なコンポーネントはマシン ビジョン アルゴリズムです。手ごろな価格の当社製品には、カスタマイズ済みで全面的に自社開発のマシン ビジョン アルゴリズムが用意されているので、何らかの市販製品を購入する必要がなく、マシン ビジョン製品のコストを大幅に低減できます。同時に当社のマシン ビジョン プラットフォームは、市販製品をしのぐ性能を備えています。当社のスケーラブルな製品は、お客様の要件に応じてさまざまな視覚誘導用途に対応できます。使いやすい当社製品は、優れた使い勝手を備えたスマート カメラのように機能するので、マウスでドラッグしてクリックするだけで視覚誘導用途に迅速に配備できます。この製品は、UR 社製ロボットや EPSON 社製ロボットをはじめとする数種類のインダストリアル ロボットで視覚誘導を実行して検証しており、良好な試験結果が得られています。
問題の提示
インダストリアル自動化製造のマシン ビジョンに対する応用技術として、視覚誘導は最も広く知られているもののひとつです。理論上の視覚誘導は、必要なアクションを実行するために実行ユニットを目的の位置に誘導することを目的としています。実行ユニットとしてロボット、シリンダ、モータなどがあり、必要なアクションとしてピックアンドプレース、はんだ付け、組み立てなどがあります。図 1 に示すように、自動化では視覚誘導ロボットが広く使用されています。ロボットが目を持ったかのように、視覚誘導によってロボット動作の確度が大幅に向上し、ロボットの応用範囲が広がります。
視覚誘導の応用を実現するには、マシン ビジョン技術として a) 物体位置認識、b) 校正、c) 通信が必要です。このような視覚誘導技術は、インダストリアル分野でも広く使用されています。図 2 に示すように、ここでは検査用途で物体位置認識技術を使用します。普通は、検査を実施する前に物体位置認識アルゴリズムを使用して対象物の位置を特定する必要があるからです。同様の理由から、寸法測定用途でも物体位置認識を使用します。したがって、視覚誘導は、最も広く普及しているインダストリアル マシン ビジョン技術であるといえます。
視覚誘導を実行する製品がいくつか市販されていますが、それらは 2 つのグループに大別できます。1 つはスマート カメラを使用した製品で、もう 1 つは従来のカメラを使用した製品です。スマート カメラを使用するグループの代表的な製品は Cognex と Halcon が提供しています。従来のカメラを使用したグループの代表的な製品は Halcon が扱っています。表 1 は、このような種類のマシン ビジョン製品のコストをまとめたものです。スマート カメラは、使い勝手に優れ、開発コストも少なくてすみますが、製品コストは高くなります。従来のカメラは、製品コストは少なくてすみますが、使い勝手は悪く、開発コストも高くなります。図 3 は、主にマウスのドラッグとクリックの操作で使用するスマート カメラを示しています。従来のカメラで高度なプログラミングを実行するには専門のエンジニアが必要になります。したがって、どちらの種類の製品でも合計コストは高くなります。また、スマート カメラでも従来のカメラでも、視覚誘導機能を使おうとするとすべてのアルゴリズム パッケージを購入する必要があり、これも高コストの原因となります。
お客様のニーズと市販製品とのギャップを埋めるには、カスタマイズした視覚誘導製品が必要です。その開発には次のような課題があります。
- 自社開発のマシン ビジョン アルゴリズム: 市販の視覚誘導製品のコストが高くなる原因は、マシン ビジョン アルゴリズムにあります。システムのコストを削減するには、市販のマシン ビジョン ライブラリを購入することはできず、アルゴリズムを自社開発する必要があります。これは、イノベーションによって当社製品の中核的な能力を生み出すことです。
- 競争力のある性能を備えながらも低コスト: コストが低くても、性能が劣る製品ではお客様に受け入れていただけません。したがって、当社自社開発のマシン ビジョン アルゴリズムは、市販製品をしのぐ性能を備えている必要があります。
- さまざまな種類の誘導用途に合わせて構成できる機能: スカラ ロボット、6 軸ロボット、シリンダ、モータなどのさまざまな実行ユニットを誘導する必要があるので、多彩な用途の要件に応じてユーザが構成できる製品を 1 つのシステムで実現する必要があります。
- オペレータによる操作との親和性: スマート カメラ同様の使い勝手を提供する製品にする必要があります。
- 生産ラインで稼動できるインダストリアル水準の品質: 低コストであっても、製品品質が低下することは許されません。
- デジタル工場をサポートできる潜在的能力の装備: TE にとってデジタル工場は重要であり、興味を持たれるお客様が数多く存在します。したがって、ネットワークに接続して情報交換ができる能力を検討する必要があります。
当社では、構成可能でカスタマイズ済みの視覚誘導ソリューションを開発しました。視覚誘導に使用するすべてのマシン ビジョン アルゴリズムをすべて自社開発し、市販製品はまったく購入していないので、システムのコストを大幅に削減できました。当社のシステムは市販製品に匹敵する性能を備えています。さまざまな用途に合わせて構成を変更できる製品を提供します。このソリューションはスマート カメラ同様の操作方法を採用しているので、ユーザー側ではマウスのドラッグとクリックの操作だけでソフトウェアを構成して、視覚誘導を応用できます。この当社製品は、UR 社製ロボットや EPSON 社製ロボットをはじめとする数種類のインダストリアル ロボットで視覚誘導を実行して検証しており、良好な試験結果が得られています。市販製品とのコスト比較では、1 セットあたりのコスト削減額は約 5,000 米ドルであり、考えられる配置先を 200 か所以上と想定すると、この技術によるコスト削減額は 100 万米ドル以上にもなります。
解決方法と結果
AMT 視覚誘導製品
当社の製品は、視覚誘導用途のすべてのソリューションを提供します。図 4 に示すとおり、当社製品のパッケージはソフトウェア、小型コントローラ、および 2 メガピクセルのインダストリアル カメラで構成されています。カメラを使用して画像を取得し、その画像をソフトウェアで処理して結果をフィードバックできます。小型コントローラは、ホストとしてソフトウェアを実行できます。
システム全体の中心はソフトウェアです。このソフトウェアは、カスタマイズしたマシン ビジョン アルゴリズムと統合されているだけではなく、構成可能な動作をユーザーに提供します。すべてが完備したソリューションをユーザーに提供するために、カメラとコントローラも同梱しています。お客様がカメラとホストの選定に時間を費やす必要はありません。
ソフトウェアの構造と機能
構成可能なソフトウェアの開発は複雑なプロジェクトです。したがって、当社ではまず図 5 に示すソフトウェアの概念構造を作り上げました。この構造は 3 層から成り、各層はその上層のみにサービスを提供し、下層からサービスを受けます。機能モジュールは各層で特性が設定されています。各層の堅牢性を引き上げるために、各層の機能モジュールは、そのモジュールに関連するエラー処理も扱います。
最下層は、ソフトウェアと環境との通信を扱う入出力 (I/O) 層です。ここには 4 つの機能モジュールがあります。カメラ インタフェース モジュールは、カメラのトリガー、画像の取得、カメラのパラメータの読み取りと設定に使用します。TCP/UDP モジュールは、TCP/UDP プロトコルに対応したデバイスとの通信を可能にする TCP プロトコルと UDP プロトコルを実装します。現在のところ、ほとんどすべてのインダストリアル ロボットが TCP/UDP プロトコルに対応しています。デジタル I/O モジュールは、従来のデジタル I/O を通じた通信ができるようにします。アーカイブ モジュールは、画像、システム ログ、プログラム レシピ、検査結果などの情報のアーカイブ化に使用します。
中間層はアルゴリズム&制御層です。I/O 層からの画像を受け取り、所要の処理を実行して I/O 層と GUI 層にフィードバックします。この層では、ソフトウェア全体の論理制御も扱い、各層間の複雑なタスクをスケジュール設定します。
最上層は GUI 層です。画像と結果の表示に使用するほか、双方向の操作によってユーザーがこの層でソフトウェアの設定を調整できます。
マシン ビジョン ライブラリの構造と機能
アルゴリズム&制御層には、自社開発のマシン ビジョン アルゴリズム ライブラリが組み込まれています。このライブラリの構造と機能を図 6 に示します。マシン ビジョン ライブラリが持つ 2 つの主要機能として、画像データの表現と画像の処理があります。
ライブラリによる画像表現は、コンピューターの物理メモリに画像データを読み書きする効率に影響します。したがって、マシン ビジョン アルゴリズムの効率が大きな影響を受けます。たとえば、2 メガピクセルの画像データを読み取るとき、このアルゴリズムではピクセルの読み取り処理を 200 万回実行することになります。各アルゴリズムでは画像データを数回読み取ることが普通であるため、画像表現のパフォーマンスが不足すると、アルゴリズムの効率が著しく低下します。当社製品の画像表現を試験したところ、良好な表現処理の速度は、パフォーマンスが低下した表現処理よりも 3 倍以上高速です。
I/O 層にある画像データには、当社で定義した画像表現がありません。通常、I/O 層のデータ形式には、カメラから得られた未加工画像データ、QT 形式 (Qimage)、Visual Studio C++ 形式 (Cimage) の 3 種類があります。したがって、当社では、得られた画像データを指定の画像表現に変換する形式変換アルゴリズムを特別に提供しています。
画像処理アルゴリズムに関しては、主要な関数モジュールとして、画像処理ライブラリに 1) 画像処理、2) 数理処理、3) ライセンスの 3 つが用意されています。
1.画像処理: カスタマイズしたマシン ビジョン アルゴリズムを備えたモジュールです。このモジュールには、視覚誘導に関するアルゴリズムがいくつかのサブグループでグループ化されています。これらの各サブグループで、それぞれのタイプの画像処理アルゴリズムを扱っています。たとえば、物体位置認識のサブグループではテンプレート照合のアルゴリズムを提供し、校正のサブグループではキャリブレーション機能に関するアルゴリズムを提供しています。
2.数理処理: 画像処理アルゴリズムの基本は数理演算であり、このライブラリで頻繁に使用されます。したがって、当社では、マシン ビジョン ライブラリ内部で高効率なマシン ビジョン ライブラリを実現しました。このモジュールには 4 つのサブグループがあり、たとえば、三角法のサブグループには、三角法の値を計算するアルゴリズムが用意されています。検索のサブグループでは、数種類のルックアップ アルゴリズムを提供しています。
3.ライセンス: この自社開発アルゴリズムは TE の知的財産であり、とりわけ暗号化と復号化の機能を提供して製品の承認を管理しています。
考察および要点
本ホワイトペーパーでは、再現性、拡張性、購入しやすさ、使いやすさを特長として、あらゆる水準のユーザーにお勧めできる視覚誘導製品の 1 つを紹介します。この当社製品は、UR 社製ロボットや EPSON 社製ロボットをはじめとする数種類のインダストリアル ロボットで視覚誘導を実行して検証しており、良好な試験結果が得られています。
謝辞
埋め込み型マシン ビジョン システムに関する様々な情報および技術をご提供いただいた Mr. Josef Sinder 氏に、筆者一同、心より感謝いたします。