Whitepaper
Accelerometer mit großer Bandbreite zur Zustands-überwachung
EINFÜHRUNG
Die Überwachung des Maschinenzustands und die vorausschauende Wartung beruhen auf der frühzeitigen Erkennung von Veränderungen im Schwingungsspektrum, die auf Defekte oder Verschleiß hindeuten. Da der Markttrend zur Überwachung größerer und kleinerer Systeme führt, steigt auch die Signalbandbreite, die von Interesse ist. Es ist jetzt auch möglich, Beschleunigungsmesser (auch Accelerometer genannt) zur Zustandsüberwachung direkt in Geräte einzubetten. Dieses Whitepaper veranschaulicht die Anforderungen an die Überwachung einer großen Bandbreite mit einer Diskussion möglicher Quellen zusammen mit sowohl Simulations- als auch experimentellen Ergebnissen von Fehlerbedingungen.

Die meisten Maschinen, die von großen Elektromotoren angetrieben werden, haben einen Eingangsantrieb, der mit einer Drehzahl zwischen 900 und 3.600 U/min (15 bis 60 Hz) läuft. Diese Grundfrequenz kann leicht mit Beschleunigungsmessern mit relativ geringer Bandbreite überwacht werden, aber die Informationen, die dieses Signal liefert, sind möglicherweise nur auf Unwuchtzustände beschränkt.
Wälzlager sind eine häufige Ursache für Maschinenausfälle. Wenn Lagerdefekte auftreten, kann der Vibrationspegel, der in den frühen Phasen des Ausfalls erzeugt wird, sehr gering sein und könnte durch Vibrationen aus anderen Quellen überdeckt werden. Die Analyse im Frequenzbereich ist sehr nützlich, um kleine Signale aufzudecken, die im Zeitbereich verborgen sein können. Lagereigenfrequenzen sind in der Regel um ein Vielfaches höher als die Laufgeschwindigkeit (ca. 50 % der Kugelzahl mal der Laufgeschwindigkeit) und können auch bei gut erhaltenen Geräten vorhanden sein. Lagerdefekte neigen dazu, impulsförmig zu sein, was eine Reihe von Oberschwingungen erzeugt, die mit der charakteristischen Frequenz beabstandet sind und bis zu sehr hohen Frequenzen reichen.
Getriebe stellen einen weiteren Fall dar, bei dem hohe Vielfache der Laufgeschwindigkeit/Frequenz erzeugt werden, obwohl die Analyse von Getrieben wesentlich komplexer sein kann. Die Verzahnungsgrundfrequenz ergibt sich aus dem Produkt der Zähnezahl und der Laufgeschwindigkeit in Hz. Die Größe von Seitenbändern oder Oberschwingungen dieser Frequenz kann auf das Auftreten oder die Schwere verschiedener Defekte hinweisen. Auch Zahnräder besitzen ihre eigenen Eigenfrequenzen, die durch impulsförmige Defekte oder durch starke Vibrationen bei höheren Frequenzen angeregt werden können.
Klingen und Schaufeln wiederum erzeugen selbst in gutem Zustand ein Vielfaches der Laufgeschwindigkeit an Vibrationen. Die Klingendurchlauffrequenz ergibt sich aus der Anzahl der Klingen mal der Laufgeschwindigkeit. Eine fehlende Klinge erzeugt eine große Anzahl von Oberschwingungen der Klingendurchgangsfrequenz (sowie eine zunehmende Unwucht bei 1 x Lauffrequenz).
Bei mechanischer Lockerheit ist es auch sehr wahrscheinlich, dass viele Oberschwingungen der Laufgeschwindigkeit im Spektrum erscheinen. Allgemein gesagt, kann Lockerheit zu Unterbrechungen in der Bewegung führen, und plötzliche Positions- oder Verschiebungsänderungen können sehr hohe Beschleunigungswerte erzeugen.
SIMULATIONEN FÜR GROSSE BANDBREITEN
Zur Veranschaulichung der allgemeinen Natur mechanischer Unterbrechungen wird im Folgenden eine numerische Simulation vorgestellt. Es wird angenommen, dass sich ein Teil eines Mechanismus bei einer Frequenz von 50 Hz nominell ±5 mm verschiebt. Um eine simulierte Unterbrechung zu erzeugen, schneiden wir die Auslenkung, nur bei positiven Ausschlägen, bei 4,98 mm ab, wie in der gezoomten Kurve rechts hervorgehoben:
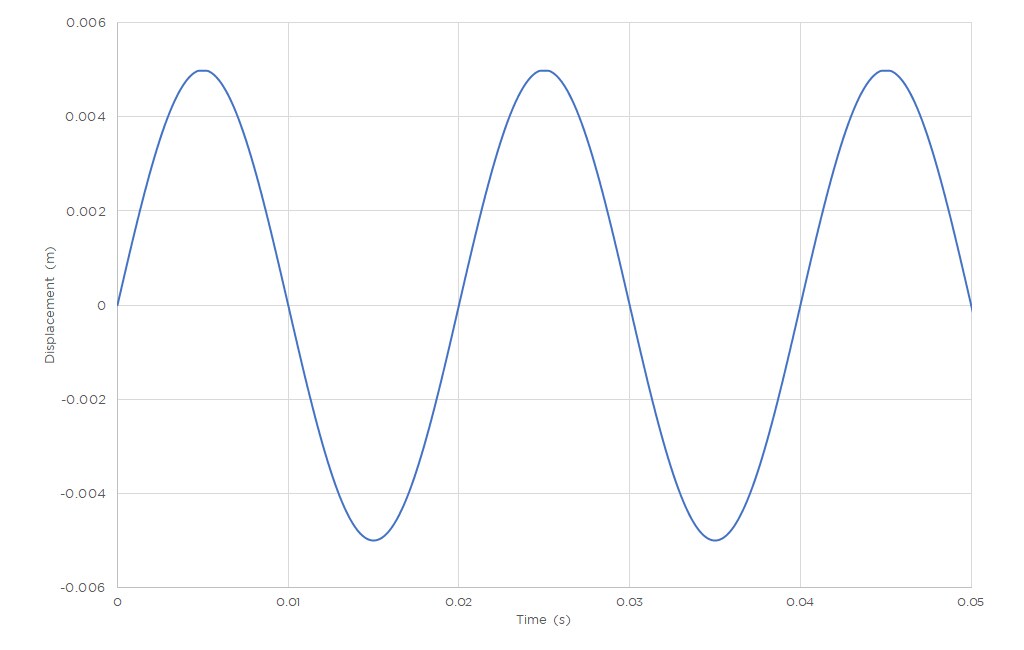
ABBILDUNG 1. VERSCHIEBUNGSKURVE MIT CLIPPING

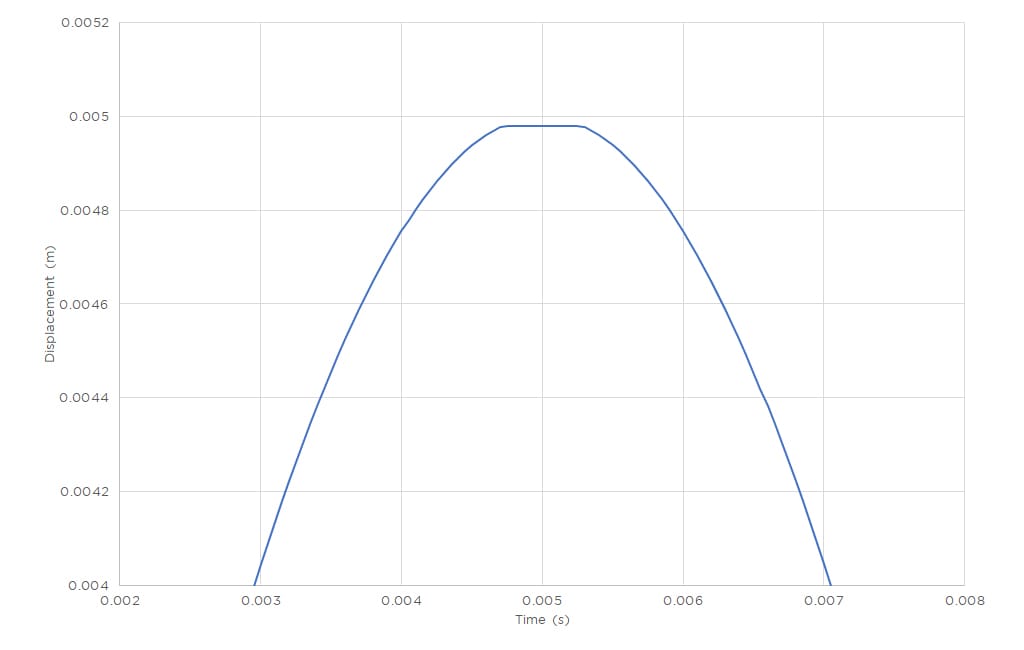
ABBILDUNG 2. VERGRÖSSERTE VERSCHIEBUNGSKURVE MIT CLIPPING
Das entsprechende Beschleunigungsdiagramm zeigt die zugrunde liegende sinusförmige Beschleunigungskomponente bei ±50,3 g, jedoch mit Impulsen, die durch den Beginn und das Ende des mechanischen Clippings erzeugt werden (mit -237 g-Spitzen):
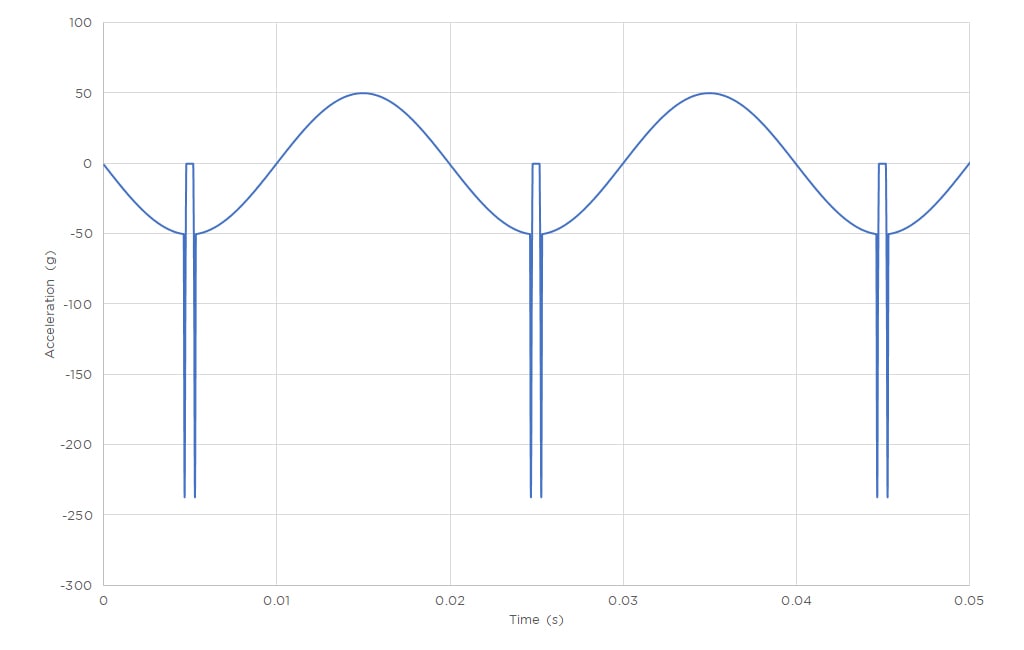
ABBILDUNG 3. BESCHLEUNIGUNGSKURVE, DIE DER GECLIPPTEN VERSCHIEBUNGSKURVE ENTSPRICHT
Nun das entsprechende FFT-Ergebnis, zunächst mit voller Bandbreite, dann ein Zoom der ersten 2 kHz:
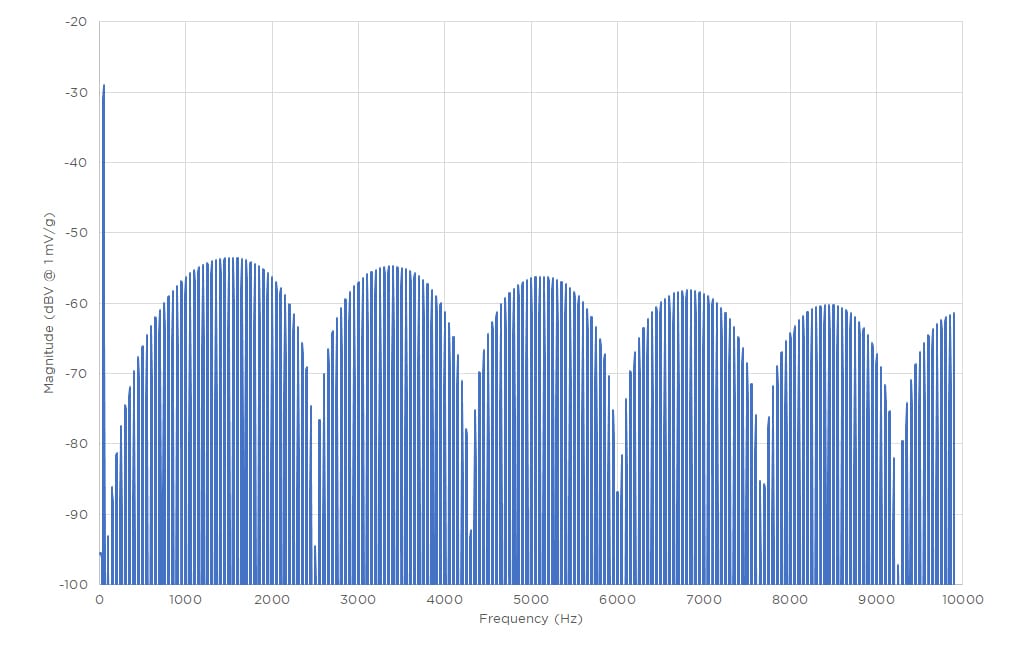
ABBILDUNG 4. FFT-ERGEBNIS BEI VOLLER BANDBREITE
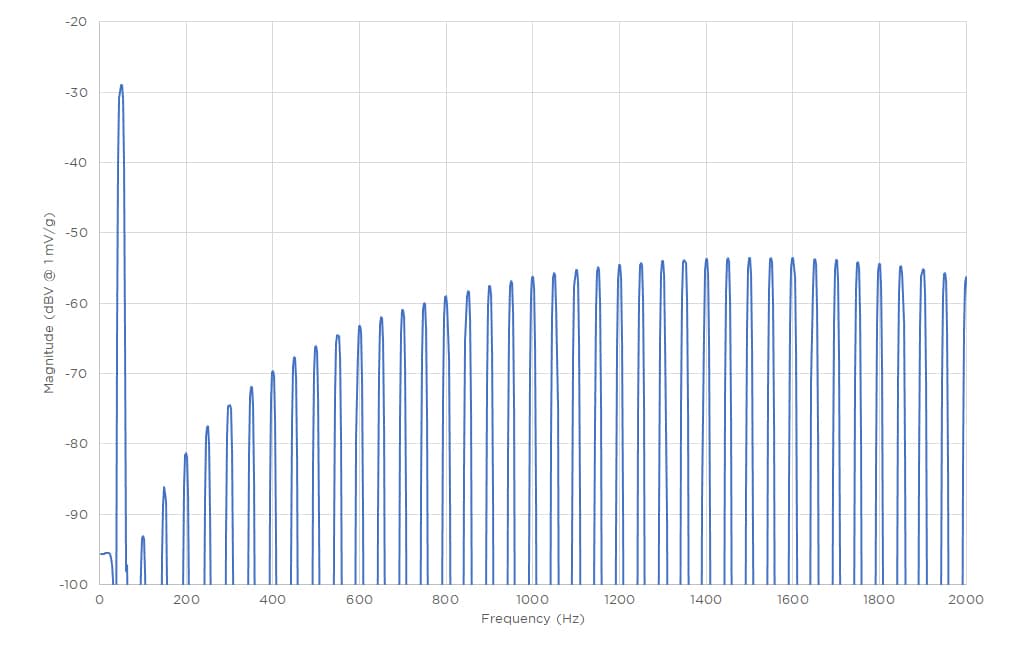
ABBILDUNG 5. VERGRÖSSERTE FFT ZEIGT HARMONISCHE STRUKTUR
Der „Defekt“ von 0,020 mm hat eine signifikante Signalenergie über eine sehr große Bandbreite eingebracht, als eine Reihe von eng beieinander liegenden Oberschwingungen der Laufgeschwindigkeit. In dieser Simulation liegt das Ausmaß bei 10 kHz nur wenige dB unter dem Pegel um 1500 Hz, und die Signalenergie würde sich weit über 10 kHz hinaus fortsetzen.
Was passiert nun, wenn wir die Bandbreite des Messgeräts (Beschleunigungsaufnehmer) begrenzen? In der folgenden Simulation wurde ein digitaler Tiefpassfilter bei 5 kHz auf die gleichen Daten angewendet:
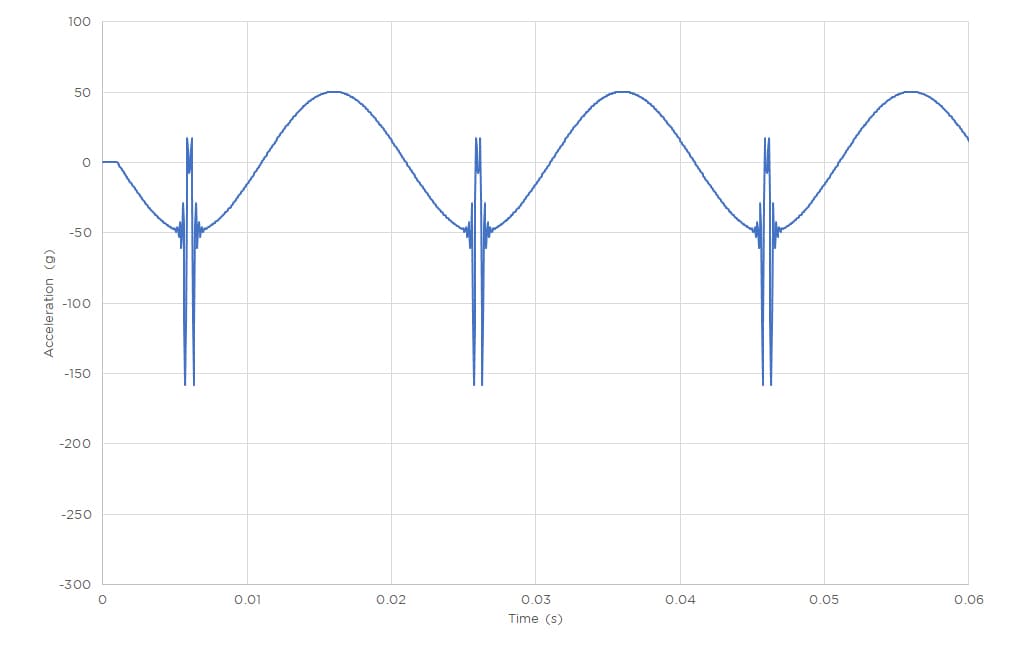
ABBILDUNG 6. BESCHLEUNIGUNGSERGEBNIS MIT BEGRENZTER BANDBREITE
In diesem Fall haben sich die negativ verlaufenden Spitzenwerte statt auf -237 g durch die Bandbreitenbeschränkung auf -158 g reduziert (ein Rückgang um ein Drittel).
Obwohl diese numerische Simulation keinen spezifischen realen Fall abbilden soll, gelten die allgemeinen Prinzipien: Abrupte mechanische Unterbechungen in der Bewegung verursachen kurze Beschleunigungsimpulse. Die Impulse erzeugen eine breitbandige Energie im Spektrum, und ein Sensor, der in seiner Bandbreite begrenzt ist, wird nicht das volle Ausmaß der störenden Ereignisse erfassen.
Auch sehr große, langsam drehende Strukturen (z. B. Windkraftanlagen) können mit mehrstufigen Getrieben mit sehr hoher Zahnzahl gekoppelt sein. Signalenergie oberhalb von 10 kHz wird als nützlich für die frühzeitige Erkennung von Defekten angesehen, da sie sich von Vibrationen niedrigerer Ordnung mit höheren Amplitudenpegeln, die unter normalen Betriebsbedingungen vorhanden sein können, deutlich abheben kann.
Einzelne Ereignisse, die zu Bruch oder Abplatzungen führen, können Energie über eine sehr große Bandbreite freisetzen (dynamische Dehnungsmessungen haben Ultraschallenergie bis zu 1 MHz gezeigt). Obwohl von herkömmlichen Beschleunigungssensoren nicht erwartet werden kann, dass sie eine so große Bandbreite erfassen, können Signale aus dem Audioband auf eine gewisse Wahrscheinlichkeit von Schäden hinweisen.
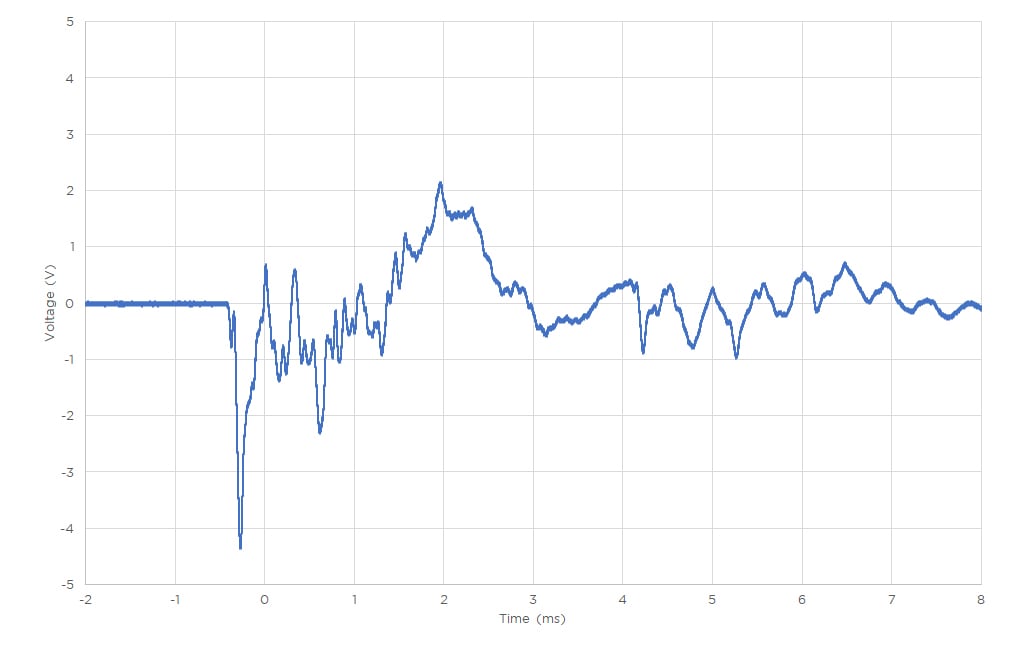
ABBILDUNG 7. ZEITSPUR METALL-GLAS-AUFPRALL OHNE BRUCH
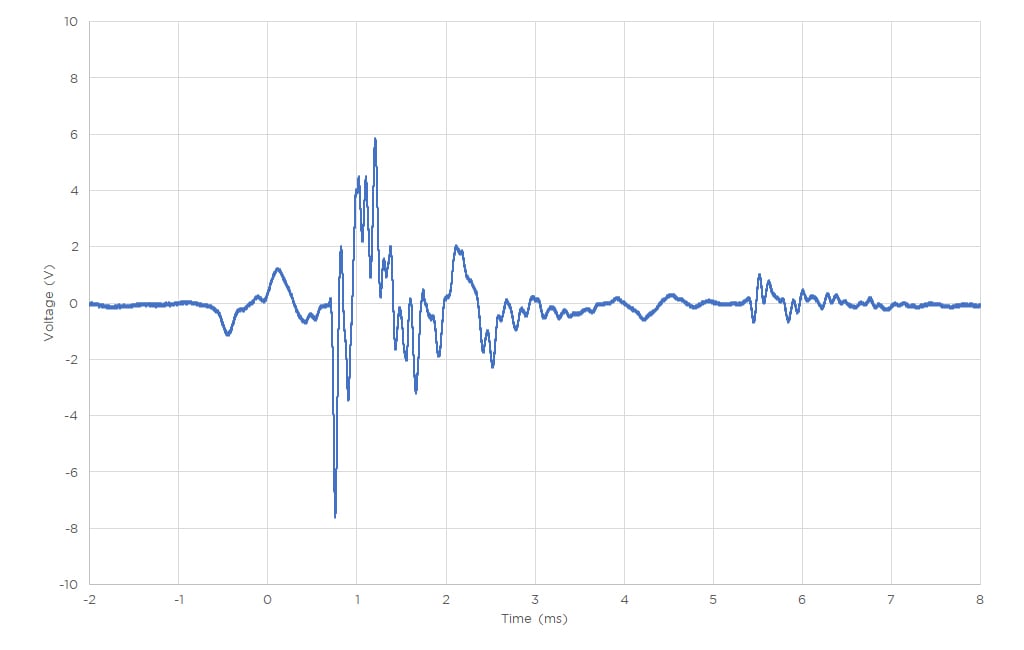
ABBILDUNG 8. ZEITSPUR METALL-GLAS-AUFPRALL MIT BRUCH
Oben sind zwei Zeitspuren dargestellt, links ein harter Metall-Glas-Aufprall, der keine sichtbaren Schäden verursachte; rechts ein Metall-Glas-Aufprall, der begrenzte lokale Abplatzungen des Glases verursachte (in einem Bereich von weniger als 1 mm Durchmesser). Ihre Spektren sind unten überlagert.
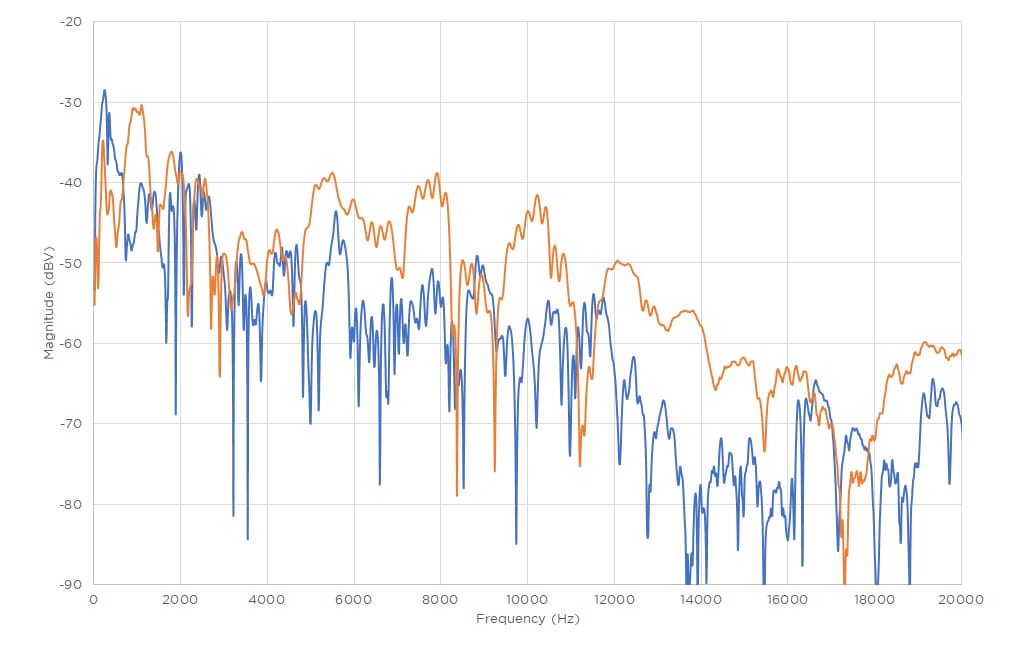
ABBILDUNG 9. FFT VERGLEICH MIT UND OHNE FRAKTUR
Die blaue Kurve ist der Aufprall ohne Abplatzungen, die orange Kurve ist mit Abplatzungen. Generell gibt es eine gute Trennung im Bereich von 5 kHz bis 15 kHz, insbesondere von 12–15 kHz.
Während es sich hierbei um transiente (zeitlich begrenzte) Ereignisse mit relativ hohen Energien handelt, können wir einige Formen des Maschinenverschleißes als eine kontinuierliche Serie von mikroskopischen Abplatzungen betrachten. Piezoelektrische Beschleunigungsaufnehmer, die eine hervorragende Auflösung über eine sehr große Bandbreite bieten, sind ein geeigneter Ansatz zur frühzeitigen Erkennung von hochfrequenten Geräuschen, die mit Maschinenverschleiß einhergehen.
ACCELEROMETER IM VERGLEICH
In einem kapazitiven MEMS-Beschleunigungssensor wird die Trägheitsbewegung eines Fingerarrays relativ zu einem festen Array durch Messung der Kapazitätsänderung zwischen den Arrays erfasst. Dies geschieht in der Regel dadurch, dass die Kapazitätsänderung eine Frequenz modifiziert, die weit über der beabsichtigten Erfassungsbandbreite liegt, die dann demoduliert werden kann, um einen endgültigen analogen Ausgang zu erhalten. Da das Gerät ständig angeregt wird, ist die Leistungsaufnahme in der Regel deutlich höher als bei einem piezoelektrischen Gerät. Bis vor relativ kurzer Zeit waren kapazitive MEMS-Bauelemente auf den Niederfrequenzbetrieb beschränkt, obwohl es einen aktuellen Trend zu Bauelementen mit höherer Bandbreite gibt.
Im Vergleich zur MEMS-Technologie können piezoelektrische Beschleunigungsaufnehmer eine deutlich höhere Bandbreite und ein besseres Rauschverhalten (Signalauflösung) erreichen. Das Sensorelement ist typischerweise ein piezoelektrisches keramisches Material (oder ein „Kristall“), das durch eine Trägheitsmasse auf Scherung belastet wird. Aufgrund der hohen Steifigkeit und der hohen Ladungsempfindlichkeit des Kristalls und der relativ geringen Masse, die erforderlich ist, um typische Erfassungsbereiche für die Zustandsüberwachung zu erreichen, wird die Resonanzfrequenz mindestens >30 kHz betragen, bei einigen Ausführungen >50 kHz. Dadurch kann sich das Passband weit über 10 kHz hinaus erstrecken. Das piezoelektrische Sensorelement selbst benötigt keinen Strom, und die Signalaufbereitung (Ladung-Spannung-Wandlung) kann in einem Gerät mit sehr geringem Strombedarf realisiert werden.
Dieses Gerät wurde nicht entsprechend der Vorschriften der Federal Communication Commission oder anderer Aufsichtsbehörden zugelassen. Dieses Gerät wird und darf erst dann zum Verkauf angeboten, vermietet, verkauft oder geleast werden, wenn die Genehmigung vorliegt. Das POC-Produkt ist nur zu Auswertungszwecken verfügbar.
AUTOR
Richard Brown, Field Application Engineer, TE Connectivity