White Paper
Future of Unmanned Systems
The naval environment involves unique challenges – pressure, flooding, corrosion – for reliably powering UUVs and USVs. TE's connectivity solutions are designed to address these challenges.
Author:
Gregory Powers, Former Market Development Manager, Global Aerospace, Defense, and Marine. Greg is no longer with TE.
The field of robotics covers every environment known to man: sea, ground, air, and space. Many are familiar with unmanned aerial vehicles (UAVs) – or space probes and planet rovers – when they think of unmanned systems. Beyond UAVs, there are also unmanned underwater vehicles (UUVs) and unmanned surface vessels (USVs), which have begun to capture headlines in relation to security and defense. Likewise, terrestrial unmanned ground vehicles (UGVs) are now gaining their share of the limelight. The U.S. Navy is even experimenting with a humanoid robot (SAFFiR) to help fight shipboard fires as a first responder.
Most UAVs use lightweight datalinks and typically have an unobstructed environment to converse real time with receiving stations.
Each of these unmanned systems is meant to operate in an environment and ecosystem where a machine can either augment or replace a human. Reasons include safety, environmental concerns, technological superiority, or costs. Sending an unmanned vehicle can be less dangerous and less expensive than sending a human. Application requirements drive the technology of the electromechanical building blocks used to create the robot, and these solutions can range from the mundane to the extreme. There are remarkable technological and economic paradigms associated with each mission that lead engineers to select specific connectivity solutions.
UAVs – SwaP and Bandwidth
Whether shoulder launched or carrier launched, UAVs are all about SWaP (size, weight, power) and bandwidth. Lightweight construction, including connectivity solutions, is paramount to enable maximum payload, range, and time on station. While high-speed signal processing is important in surveillance and similar applications, communication bandwidth is more conveniently handled in UAVs than in other unmanned vehicles. Most UAVs use lightweight datalinks and typically have an unobstructed environment to converse real time with receiving stations. As a result of their environment, UAVs benefit from lightweight, high-capacity power distribution equipment. Cables and harnessing components have become lighter over the years. Cross-linked insulation and jacketing materials allow significantly thinner wall thicknesses, saving both space and weight. Since every gram counts, TE Connectivity (TE) recently introduced lightweight heat-shrink boots that are up to 20 percent lighter than the parts they can replace. In many instances, fiber optic connectivity has been implemented as the exemplification of low weight, high bandwidth and EMI immunity.
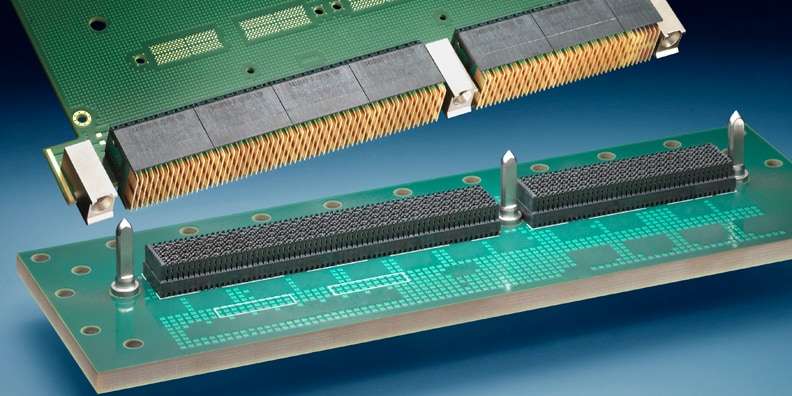
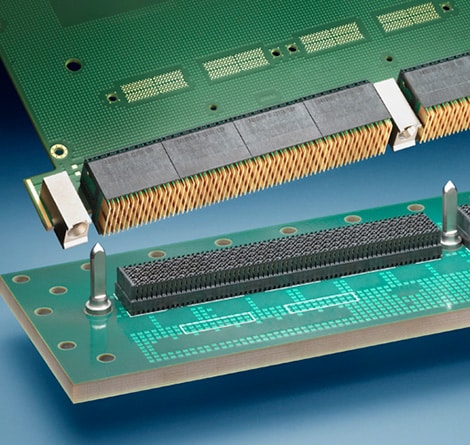
Local processing of images and signals intelligence allows the UAV to sift and prioritize data to be transmitted to the receiving station. With sophisticated processing comes the need for high-speed embedded computing. TE’s VITA 46 VPX standard MULTIGIG RT 2-R backplane connector (Figure 1) is suitable for this role. The open architecture VPX connector is modular and scalable for application flexibility, and has been demonstrated in excess of 10 Gb/s for excellent functional density. UAV designers are also benefiting from advances in composite and selective metallization to create integrated composite enclosures and antennas.
UGVs – Rugged and Cost Driven
UGV design has traditionally targeted lower costs as a high priority. Reasons include the potentially high number of units produced, the less challenging nature of the ground environment, and the fact that UGVs are often considered expendable. Nevertheless, UGVs are expected to be rugged and perform when needed, driving designers to tread a fine line between cost and performance. UGVs range from small, inexpensive rovers that might have a camera or other sensor to high-capability, multifunction systems. Given the wide range of these platforms, connectivity solutions range from commercial, industrial or automotive connectors to mil-spec connectors. In each instance, connectivity solutions must be appropriately engineered to suit the application.
Vehicles like Humvees and trucks to support logistics are being designed to operate in either a manned or unmanned mode.
At one end are relatively basic, low cost, potentially expendable systems. Vehicles like Humvees and trucks to support logistics are being designed to operate in either a manned or unmanned mode. They can use weatherresistant automotive connectors, IP67 input/output connectors, and military or military-style circular connectors. MIL-DTL-38999 connectors and their close relatives remain one of the most popular choices for rugged interconnect. Beyond a full mil-qualified connector, a great variety of connectors use the familiar 38999 shell as the basic form factor. The new generation of military-style COTS circular connectors are ideal for UGVs. For example, TE’s Wildcat Micro and 38999 connectors are based on military circular connector design practice. With between 3 and 9 contacts, the Wildcat Micro bayonet latching mechanism is very robust and enables quick and positive coupling. An anti-vibration triple-start threaded coupling option is also available, as well as various mounting options and rear accessory features.

Based on Mil-DTL-38999, Wildcat 38999 connectors are available in four housing sizes with between 11 and 64 contacts and offer almost double the contact density of traditional 38999 connectors. The triple start coupling thread provides robust and high-reliability engagement to help withstand severe shock and vibration, and the connectors are fully sealed, a vital feature for all-weather operation or potential submersion during a mission. Beyond ruggedness and high density, many sensor systems found on unmanned systems demand bandwidth. TE’s CeeLok FAS-X connector supports 10 Gb/s Ethernet in a 38999 shell – accommodating a single Ethernet channel in a size 11 shell or four channels in a size 25 shell. One advantage of 38999-derived connectors is that they can use the same, readily available backshells and other accessories.
UUVs – Challenging Environment
The naval environment brings unique challenges, particularly in terms of withstanding the undersea pressures, operating in a flooded environment, and protecting against salt-induced corrosion. Electronics are often housed in containment vessels or line-replaceable units (LRUs). Subject to the effects of hydrodynamics, UUVs that are expected to operate at any significant forward speed most often have minimal frontal cross-section or are torpedo shaped and space is very much at a premium. The need for underwater performance as well as space and weight-saving higher densities are often in conflict. Given the resulting packaging challenges, small-form-factor, rugged connectors, such as the dry-mate TE's SEACON MINI-CON connectors, work well in the UUV environment. TE's SEACON MINI-CON connectors were developed as a small-diameter, high-density, high-pressure system, available in 13 shell sizes and up to 203 contacts. The standard connector withstands 16,000 psi, although higher pressure versions are available.

Wet-mate connectors tend to be larger since they need both pressure balancing and a mechanism to seal the unmated connector contacts. They also need generous lead-in to allow proper mating of connector halves robotically by a UUV in an underwater environment. While wet-mate connectors have long been used in subsea petroleum production, they may also find use in naval applications such as an underwater docking system for UUVs. There remains a need to create autonomous underwater vehicles. The remotely operated vehicles used in oil and gas applications are controlled directly through a long umbilical cable for power, control, and data. Power lines and fiber optic cables in the umbilical cable provide adequate power and bandwidth. However, the range, freedom and stealth of tethered remotely operated vehicles (ROVs) can be problematic in defense applications.
Each environment – sea, land, air and space – poses its own hurdles and has a profound effect on the unmanned system’s design.
Untethered autonomous operation can create its own set of issues, including means of communication and power supply. A vehicle underwater does not have the same convenient wireless communication capabilities of a UAV or UGV. Water does not transmit RF signals well. While acoustic communications or low-frequency towed antennas allow some degree of communications, they are not efficient for higher data payloads. A common use for acoustic signals is simply to tell the UUV to surface to send or receive communications. Once surfaced, the UUV has clear communication capabilities either with nearby vessels or with satellites. As a consequence of the communications issues, many UUVs do not perform intense on-board signal processing. Unlike the heavy signal processing performed by a UAV to obtain high-resolution photos and video, a UUV’s needs tend to be more humble. If the embedded computer is well protected from water and pressure, its operating environment is relatively benign—without the shock and vibration that UAVs and UGVs experience. COTS embedded computing systems will provide the required processing power mechanical and environmental robustness required. Sealed connectors are required between the protected environment and the rest of the UUV. Power supply on UUVs is typically by battery. The latest in battery technology, as well as efficient power distribution and low power consumption systems are vital to range and mission success. Minimizing SWaP is a common theme in unmanned system design.
Unmanned World
As sensor, software and processing technologies evolve, so will the effectiveness and presence of unmanned robotic systems. One thing that is not going to change is the environmental challenges facing robotic systems. Each environment – sea, land, air and space – poses its own hurdles and has a profound effect on the unmanned system’s design. These challenges range from the most basic, for example, material selection, to the highest level, such as the level of autonomy required. Similarly, the role of connectivity and range of solutions available to the designer is affected by the unmanned system’s environment. As interconnect science merges form and function, the role of connectivity will continue to rise in importance in the future of unmanned system design.