Entwicklung eines autonomen mobilen Transportsystems
KURZFASSUNG
Autonome mobile Roboter spielen eine wichtige Rolle beim flexiblen Materialtransport. Basierend auf der simultanen Positionsbestimmung und Kartenerstellung (Simultaneous Localization and Mapping, SLAM) entwickelte mobile Roboter können Karten erstellen, Routen planen und optimieren sowie Hindernisse vermeiden. Sie sind äußerst flexibel und agil zur Automatisierung der Werkslogistik einsetzbar, um den digitalen Wandel hinsichtlich der automatischen Lagerung und dem automatischen Transport von Materialien umzusetzen. Wir haben uns eingehend mit Navigationstechnologieanwendungen mit mobilen Robotern beschäftigt und aus einer strategischen Perspektive Lösungen zur Automatisierung der Mizusumashi-Prozesse (Linienversorger) entwickelt.
PROBLEMSTELLUNG
Beim herkömmlichen Ansatz für den Materialtransport erfolgt der Transport der Materialien vom Material-Supermarkt oder Lager in die Fertigungsbereiche durch einen Mizusumashi (Linienversorger). Abb. 1 zeigt einen allgemeinen Mizusumashi-Prozess, bei dem ein Bediener einen mit Materialkartons beladenen Handwagen in einem TE Werk zieht oder schiebt. Normalerweise werden die Materialien nicht direkt zu den Fertigungsstraßen, sondern zunächst in einen Pufferbereich gebracht, siehe Abb. 2. Die Fertigungsstraßen holen die Materialien aus dem Pufferbereich ab. Sobald keine ausreichende Menge an Materialien für die nächsten zwei oder mehr Stunden für die Produktion vorhanden ist, bringt die Fertigungsstraße ein Etikett im Pufferbereich an, um weitere Materialien anzufordern. Die Materialversorger prüfen die Verfügbarkeit der Materialien im Pufferbereich, sobald sie die Materialanforderung sehen oder erhalten, und fordern die Materialien im Material-Supermarkt oder Lager an. Dabei wird der Transport der Materialen von einem Mizusumashi übernommen. Der konventionelle Ansatz ist also arbeitsintensiv und wenig effizient. Außerdem müssen in der Regel viele verschiedene Arten von Materialien verwaltet werden, und die Lokalisierung der Materialien ist aufwendig, was die Effizienz des Materialtransports ebenfalls beeinflusst. Was aber noch schlimmer sein kann: Der manuelle Mizusumashi kommt der Materialanforderung nicht rechtzeitig nach und die Fertigungsstraßen müssen auf die Materialien warten, was die Produktivität der Fertigungsstraßen beeinträchtigt.
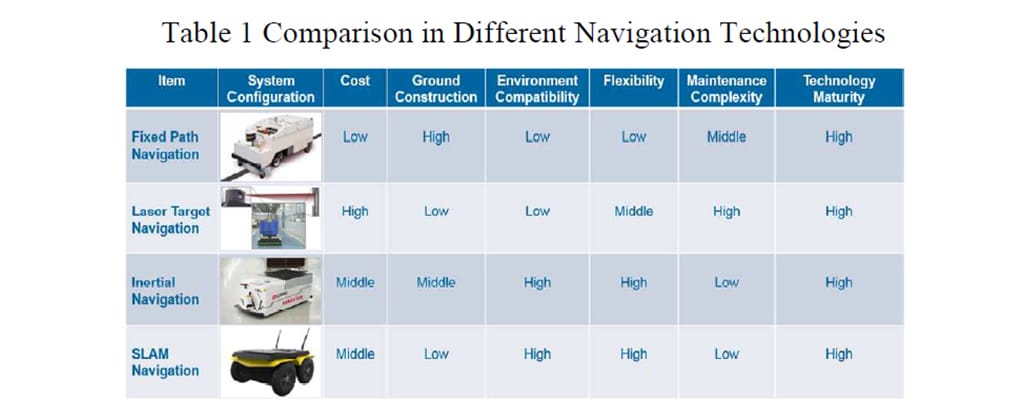
Die Automatisierung und digitale Transformation würden wesentlich dazu beitragen, die Effizienz des Materialtransports zu verbessern und die Reaktionszeit zu verkürzen. Autonome mobile Roboter, die sich selbstständig bewegen und durch digitale Verbindungen mit den Fertigungsstraßen und MES-Systemen erweitert werden können, sind eine ausgezeichnete Alternative zu manuellen Mizusumashi-Prozessen. Es gibt generell vier wichtige verschiedene Arten von Navigationstechnologien: Festweg-Navigation, Laserzielnavigation, Trägheitsnavigation und SLAM-Navigation, siehe Tabelle 1.. Die Festweg-Navigation, für die magnetische Bänder auf dem Boden angebracht werden müssen, um den mobilen Roboter zu leiten, weist die geringste Mobilität und Flexibilität auf. Bei der Laserzielnavigation reflektiert ein Laserziel einen Laserstrahl an den Roboter zur genauen Ortsbestimmung. Diese Methode weist eine geringe Kompatibilität mit der Umgebung auf, d. h., wenn sich die Laserzielposition ändert oder durch andere Hindernisse blockiert wird, ist die präzise Navigation des mobilen Roboters sehr schwierig. Die Trägheitsnavigation, für die auf dem Boden magnetische Nägel oder QR-Codes angebracht werden müssen, weist eine bessere Kompatibilität mit Umgebungsänderungen auf, ist aber nur in Bereichen anwendbar, die mit magnetischen Nägeln oder QR-Codes ausgestattet sind. Die SLAM-Navigation, bei der die Karte zur Wegfindung, Hindernisvermeidung und autonomen Navigation in Echtzeit aktualisiert werden kann, weist die höchste Kompatibilität mit der Umgebung und die höchste Flexibilität zur autonomen Bewegung auf. Sie ist eine optimale Navigationstechnologie für den flexiblen Materialtransport in Fertigungsbereichen, in denen häufig Interaktionen mit Personen oder anderen mobilen Geräten stattfinden können. Tabelle 1 vergleicht verschiedene Navigationstechnologien. Unser Ziel ist es, auf SLAM-Navigation basierende autonome mobile Transportsystemen für TE zu entwickeln.
METHODEN UND ERGEBNISSE
Modernste Navigationstechnologie für mobile Roboter
Auf Ortsbestimmung und Umgebungswahrnehmung basierte Navigation ist ein hochrangiges Forschungsthema in der Robotik. Im Allgemeinen ist eine globale Wegplanung gut darin, einen optimierten Weg zu erstellen, aber schlecht darin, auf unbekannte Hindernisse zu reagieren. Im Gegensatz dazu funktioniert eine lokale/reaktive Navigationsmethode in einer dynamischen und zunächst unbekannten Umgebung gut, aber ist insbesondere in komplexen Umgebungen[1] wenig leistungsfähig. Diese Studie untersucht globale und lokale Wegeplanungsalgorithmen und schlägt eine hybride Navigationsmethode vor.
Die globale Wegeplanung wurde theoretisch eingehend untersucht und in vielen praktischen Fällen angewandt. Häufig wird ein graphbasierter Algorithmus verwendet, z. B. Dijkstra[2], A*[3] und Voronoi[4], die normalerweise auf einer begrenzten Fläche verwendet werden. APF-Methoden (Artificial Potential Field)[5] nutzen mehr Umgebungsinformationen und sind für die Echtzeitnavigation geeignet.
Die von APF erstellten Bewegungsbahnen sind jedoch in der Regel nicht optimal. Der Markov-Entscheidungsprozess ist eine probabilistische Methode, bei der sich die Entscheidung nur auf den letzten Zustand bezieht und nichts mit früheren Zuständen zu tun hat. Außerdem werden einige andere globale Wegeplanungsalgorithmen[6] zum Erreichen des Ziels diskutiert.
Die lokale Wegeplanung beschäftigt sich mit der Hindernisvermeidung in einer lokalen Umgebung. Model Predictive Control (MPC) [7] wird aufgrund ihrer Robustheit und Konvergenz bei der Wegeplanung zunehmend bei der Navigation autonomer mobiler Roboter eingesetzt. Der Grundgedanke von MPC ist es, für die Wegeplanung die Zukunft mit individuellen Modellen vorherzusagen, und dann eine erste Kontrolle der entsprechenden vom mobilen Roboter gewählten Bewegungsbahn durchzuführen. Dynamic Window Approach (DWA)[8], die Dynamik-Fenster-Methode, wertet jede Bewegungsbahn aus und wählt dann die Bahn mit der höchsten Punktzahl aus. Sie ist nicht nur ein unabhängiger Algorithmus, sondern auch Bestandteil von MPC. DWA geht jedoch davon aus, dass alle Hindernisse statisch sind, was für die Vermeidung von dynamischen Hindernissen mit relativ hoher Geschwindigkeit nicht anwendbar ist. Algorithmen wie „Velocity Obstacle“ und Kollisionskegel gehen davon aus, dass sich Hindernisse mit einer bestimmten Geschwindigkeit und Beschleunigung bewegen.
In den meisten TE Werken, in denen die Anordnung der Ausrüstung und Fertigungsstraßen natürlich relativ statisch und die Umgebungen bekannt sind, aber auch unvorhersehbare Bewegungen der Gerätebediener, die als dynamische Hindernisse gelten, erfolgen können, würde weder der globale noch der lokale Wegeplanungsansatz gut für die Navigation der mobilen Roboter funktionieren. Für die Navigation ist die Entwicklung einer Hybrid-Methode mit einer kombinierten lokalen und globalen Wegeplanung erforderlich.
Grundlage der autonomen Navigation – Kartenerstellung
Wenn der autonome mobile Roboter in einer unbekannten Umgebung eingesetzt wird, um selbstständig den Weg zum Ziel zu finden, muss der Roboter die gesamte Umgebung durchqueren, bis er das Ziel erreicht. Während einige neue Ziele hinzugefügt und gesetzt werden, sollte der Roboter nicht jedes Mal die Umgebung durchqueren, da dies hohe Rechenzeit- und Speicherplatzkosten verursacht.
Darüber hinaus ist das Ziel in der Regel eine relative Position in Bezug auf den mobilen Roboter bei der Navigation durch die Umgebung. Daher ist es wichtig, einen Umgebungsdeskriptor, z. B. eine Karte, zu verwenden, um die Umgebungsinformationen aufzuzeichnen und zu beschreiben, damit der Roboter weiß, wo er ist und wohin genau er gehen soll. Es gibt verschiedene
Kartenarten, z. B. Feature-Karten, topologische Karten, Grid-Karten und die erscheinungsbasierte Methode. Die Feature-Karte, die die Umgebung mit wichtigen Punkten, Linien oder Flächen beschreibt, ermöglicht eine anschauliche Darstellung.
Eine topologische Karte beschreibt die Knoten und die Konnektivität der Umgebung. Die erscheinungsbasierte Methode berechnet die Pose der Roboter direkt. Die Grid-Karte berücksichtigt sowohl die Einfachheit als auch die Visualisierung bei der Darstellung der Umgebung. Daher ist eine Grid-Karte die optimale Wahl als Umgebungsdeskriptor für die Navigation der mobilen Roboter. In diesem Abschnitt wird der Ansatz für die Kartenerstellung einer unbekannten Umgebung untersucht, um eine Grid-Karte zu erhalten.
Wenn keine Vorkenntnisse der Umgebung vorhanden sind, spielt die simultane Positionsbestimmung und Kartenerstellung (Simultaneous Localization and Mapping, SLAM), die die Karte der unbekannten Umgebung erstellt und gleichzeitig die Pose des Roboters verfolgt, eine entscheidende Rolle bei der Kartenerstellung. Bei unserer Methode wird der Rao-Blackwellized-Partikelfilter für SLAM eingesetzt, um die Zuverlässigkeit und Qualität der Karte zu gewährleisten. Einer der häufigsten Partikelfilter-Algorithmen ist der SIR-Filter (Sampling Importance Resampling). Die Kartierung mit einem Rao-Blackwellized-SIR-Filter wird in folgende Schritte unterteilt:
- Sampling: Die aktuelle Pose des Roboters xt(i) wird aus der letzten Pose des Roboters xt-1(i) durch die Vorschlagsverteilung π(xt|z1:t,u0:t) berechnet.
- Bedeutungsgewichtung: Jedes Partikel wird anhand seiner Gewichtung formuliert, siehe Gleichung (1).

- Resampling: Um unendliche Partikel zu verhindern und die Konvergenz des Algorithmus zu gewährleisten, sollte die Menge der Partikel reduziert werden, und die Partikel von geringer Gewichtung werden durch die Partikel hoher Gewichtung für den Resampling-Prozess ersetzt.
- Kartenschätzung: Die aktuelle Karte mt(i) wird anhand der historischen Beobachtungen z1:t und Posen x1:t geschätzt.
Daher besteht die Grundidee des Rao-Blackwellized-Partikelfilters darin, eine A-posteriori-Wahrscheinlichkeit der Karten und Bewegungsbahnen zu berechnen, siehe Gleichung (2).
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Dabei ist u0:t die Sequenz der Odometrie-Messungen einschließlich der Anfangspose, z1:t ist die Sequenz der Beobachtungen, x1:t beschreibt die möglichen Bewegungsbahnen und m stellt die Karte dar.
Eine Simulationsumgebung wird konstruiert, um den Kartenerstellungsalgorithmus zu überprüfen, siehe Abb. 3. Der mobile Roboter bewegt sich im freien Raum, die Umgebung wird durch umgebende Wände begrenzt und die Felder im Inneren stellen verschiedene Stationen dar, die mögliche Hindernisse repräsentieren. Der blau dargestellte Bereich in Abb. 3 ist der Erfassungsbereich des mobilen Roboters. Durch die Anweisung des mobilen Roboters, sich in dieser Simulationsumgebung zu bewegen, wird die Grid-Karte auf Basis von SLAM-Technologien erstellt, siehe Abb. 4..
Wegeplanung in bekannter Umgebung
Mit der Verfügbarkeit der Karte für die Umgebung wird die Ausgangsposition des mobilen Roboters oft als Startpunkt gesetzt, und das Ziel wird als Endpunkt auf der Karte gesetzt, um den Weg zu erstellen, den der Roboter folgen soll. Einen für den Roboter zugänglichen Weg vom Startpunkt zum Endpunkt unter Berücksichtigung der Roboterdynamik und der Umgebung zu finden und den Roboter anzuweisen, diesen Weg zu benutzen, wird als globale Wegeplanung und lokale Wegeplanung bezeichnet.
Bei der globalen Wegeplanung sind der Dijkstra-Algorithmus und A*-Algorithmus zwei wichtige Methoden zur Ermittlung des kürzesten Wegs. Diese Algorithmen verfügen über Breitensuche bzw. Tiefensuche. Diese Verfahren werden unten kurz beschrieben, siehe Tabelle 2..
Kurze Beschreibung des Dijkstra- und A*-Algorithmus
Tabelle 2
| Dijkstra-Algorithmus | A*-Algorithmus |
|---|---|
(1) Setzen Sie den anfänglichen Abstandswert zu jedem Knoten: Weisen Sie dem Startknoten 0 und den anderen unendlich zu. (2) Setzen Sie den Startknoten als aktuellen Knoten, und markieren Sie alle anderen Knoten als nicht besucht. (3) Finden Sie für den aktuellen Knoten den nächstgelegenen Knoten, dessen Entfernung zum besuchten Knoten am kürzesten ist. (4) Markieren Sie den nächstgelegenen Knoten als besucht, damit er nicht wieder überprüft wird. (5) Wenn der Zielknoten als besucht markiert wurde, ist die Suche beendet. Andernfalls wiederholen Sie Schritt (3). |
(1) Setzen Sie den anfänglichen Knoten als aktuellen Knoten. Berechnen Sie das Gewicht für seine Nachbarn mit f(n) = g(n) + h(n). Dabei sind g(n) die Kosten für den Weg vom Startknoten, und ℎ(n) sind die geschätzten Kosten von n zum Ziel. (2) Setzen Sie den Knoten mit der geringsten Gewichtung als aktuellen Knoten, und fahren Sie mit Schritt (1) fort. (3) Wiederholen Sie die Schritte (1) und (2), bis als aktueller Knoten das Ziel identifiziert wird. |
Mit beiden Methoden kann theoretisch ein für den Roboter zugänglicher Weg erstellt werden. Ein zugänglicher Weg bedeutet jedoch nicht, dass es zugleich ein ausführbarer Weg ist. Die lokale Wegeplanung baut eine Brücke zwischen dem zugänglichen und dem ausführbaren Weg. In dieser Studie wird der Dynamik-Fenster-Algorithmus verwendet, der folgende Schritte umfasst:
- Diskretes Sampling im Robotersteuerraum
- Prognose dessen, was für jedes mögliche Sample passieren würde (mit Vorabschätzung)
- Bewertung der Kandidaten für Bewegungsbahnen hinsichtlich der Distanz und der Übereinstimmung mit dem globalen Weg
- Auswahl der Bewegungsbahn mit der höchsten Punktzahl
- Wiederholung aller genannten Schritte
Für die Erstellung des ausführbaren Wegs weist die lokale Wegeplanung große Vorteile bei der Hindernisvermeidung auf. Wenn der mobile Roboter dem globalen Weg folgt, wird durch lokale Beobachtungen die lokale Karte erstellt, sodass neue oder unvorhergesehene Hindernisse auf der lokalen Karte markiert werden. Dann generiert die lokale Wegeplanung einen lokalen Weg, um Kollisionen mit diesen Hindernissen zu vermeiden. In diesem Fall kann der Roboter sowohl statische als auch dynamische Hindernisse von geringer Geschwindigkeit vermeiden.
Simulation der autonomen Navigation
Eine Simulationsumgebung, wie in Abb. 3 dargestellt, wird eingerichtet, und die Umgebungskarte wurde in Abschnitt II.B basierend auf dem SLAM-Algorithmus erstellt. Der Wegeplanungsalgorithmus wird für die Karte getestet, wobei der Dijkstra-Algorithmus für diesen Teil implementiert und verifiziert ist. Zuerst wird die aktuelle Pose des Roboters in der Karte konfiguriert und als Startpunkt gesetzt.
Der Roboter wird angewiesen, dem Weg zu folgen, der über die globale Wegeplanung geplant wird, nachdem das Ziel festgelegt ist. Wie in Abb. 5 dargestellt, ist der blaue Weg der globale Weg vom Start bis zum Ziel, während der gelbe Weg der lokale Weg ist, der dem globalen Weg folgt. Basierend auf mehreren Testläufen zur Verifizierung wird der Schluss gezogen, dass der Ansatz von Dijkstra einen zugänglichen globalen Weg generieren konnte
und dass der von DWA generierte lokale Weg als ausführbarer Weg erstellt werden konnte und somit dem globalen Weg entspricht.
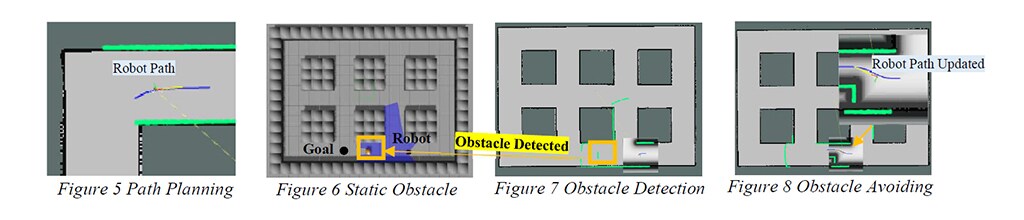
Hier wird auch die Fähigkeit zur Vermeidung von Hindernissen bewertet. Wie in Abb. 6 dargestellt, erscheint direkt vor dem Roboter ein unvorhergesehenes Hindernis, das nicht auf der Karte markiert ist. Das Hindernis befindet sich im Erfassungsbereich des Laser-Abtasters und wird vom Roboter erkannt, siehe Abb. 7.. Um zu prüfen, ob der Roboter in der Lage ist, eine Kollision mit dem neuen Hindernis
zu vermeiden und an ihm vorbeizukommen, wird ein Ziel direkt hinter dem entdeckten Hindernis konfiguriert, um zu überprüfen, wie der Roboter auf das unvorhergesehene Hindernis reagiert, um das Ziel zu erreichen. Durch die Ausführung der lokalen Wegeplanung wird eine lokale Karte erstellt, siehe Abb. 8. Dabei wird das Hindernis in der lokalen Karte aufgenommen. Die gelbe Kurve ist der lokale Weg, der zur Vermeidung des Hindernisses erstellt wird. Es wurde festgestellt, dass sich der Roboter nicht direkt vorwärts bewegt, um eine Kollision mit dem Hindernis zu verursachen, sondern dass er einem angepassten Weg folgt, indem er sich um das Hindernis herum bewegt, ohne mit dem Hindernis zu kollidieren. Dies zeigt die Fähigkeit des Roboters, statische Hindernisse zu umgehen. Es wurde aber auch getestet, was passiert, wenn der Roboter auf dynamische Hindernisse trifft, die sich auf der Karte mit einer relativ niedrigen Geschwindigkeit bewegen können. Die Testergebnisse zeigen, dass der Roboter in der Lage ist, seine lokale Karte mit dem lokalen Weg zu aktualisieren, um Kollisionen mit den dynamischen Hindernissen zu vermeiden. Die Simulationsergebnisse bestätigen den hybriden Ansatz, der eine Kombination aus globaler und lokaler Wegeplanung zur Roboterwegeplanung und Hindernisvermeidung beinhaltet.
ERÖRTERUNG UND KERNASPEKTE
Autonomes mobiles Transportfahrzeug
Wichtige Technologien, die in Abschnitt II zur Kartenerstellung und Wegeplanung mit SLAM entwickelt und überprüft wurden, verbessern die Fähigkeit der autonomen Navigation für den mobilen Roboter. Wie in Tabelle 1 dargestellt, müssen bei der SLAM-basierten Navigationstechnologie auf dem Boden keine Magnetbänder, Magnetnägel oder QR-Codes oder Laserziele an Wänden oder ortsfesten Stellen angebracht werden. SLAM ist vollständig in der Lage, die Karte einer Umgebung automatisch zu erstellen und dabei Kollisionen mit unvorhergesehenen Hindernissen zu vermeiden, die nicht auf der Karte markiert sind. SLAM-basierte mobile Roboter sind die optimale Alternative, die zur Entwicklung eines autonomen mobilen Transportsystems verwendet werden sollte.
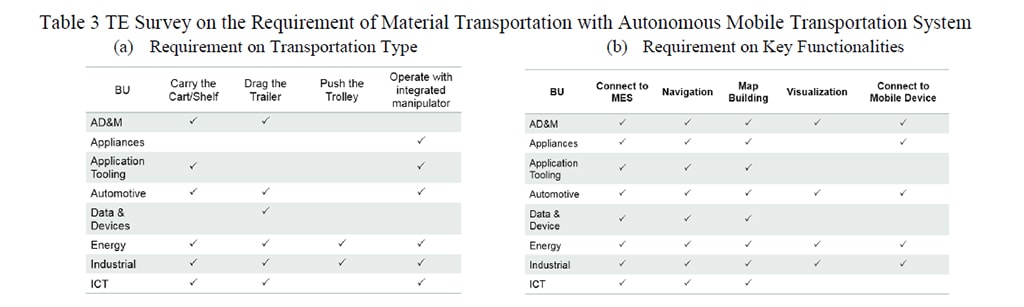
In allen Unternehmenssparten von TE wurde eine Umfrage bezüglich der Anforderungen an den autonomen mobilen Materialtransport durchgeführt. Als hohe Prioritäten beim Materialtransport wurden dabei folgende Punkte genannt: den mobilen Roboter dazu zu bringen, den Warenkorb oder das Regal zu transportieren, den Wagen zu ziehen und einen Manipulator zu integrieren, um die Materialien zu bedienen, siehe Tabelle 3(a). Wichtige Funktionen mit einer hohen Priorität, die im autonomen mobilen Roboter implementiert werden müssen, sind demnach die Verbindung mit MES, autonome Navigation und die automatische Kartenerstellung, siehe Tabelle 3(b). Die Automatisierung des Mizusumashi-Prozesses mit einem mobilen Roboter wurde als hohe Priorität von allen Unternehmenssparten bewertet. Wie in Abb. 9 dargestellt, ist der Mizusumashi-Prozess der
kritischste Prozess für den Materialtransport vom Lager/Material-Supermarkt in die Fertigungsbereiche. Hier wird vorgeschlagen, basierend auf der SLAM-Navigationstechnologie ein autonomes mobiles Transportfahrzeug zu entwickeln, das das Regal für den flexiblen Materialtransport transportieren kann (siehe Abb. 10). Das autonome Fahrzeug kann eine Traglast von mehr als 300 kg befördern und sich mit einer Geschwindigkeit von 0,8 bis 1 m/s im Werk bewegen. Es handelt sich damit um eine äußerst effiziente und wirkungsvolle Alternative, um den manuellen Mizusumashi-Prozess zu ersetzen.
Autonomes mobiles Transportsystem
Mit der Verfügbarkeit autonomer mobiler Transportfahrzeuge liegt die Lösung darin, die Fahrzeuge als Teil des autonomen Transportsystems (AMTS) zu integrieren, um schlüsselfertige Lösungen für TE Werke zu entwickeln. Abb. 9 veranschaulicht den Gesamtprozess für den Materialtransport. In der Regel muss der Bediener die Materialkartons auspacken und die Materialien im
Lager sortieren und dann die sortierten Materialien in die im Material-Supermarkt gelagerten Kartons räumen. Beim manuellen Mizusumashi-Prozess transportieren die Linienversorger die Materialien vom Material-Supermarkt in den Pufferbereich. Die Fertigungsstraßen holen die Materialien aus dem Pufferbereich ab.
Da bisher nahezu kein TE Werk keinen Teil des Prozesses
vom Lager zur Fertigungsstraße automatisiert hat, wird hier zunächst vorgeschlagen, den Mizusumashi-Prozess mit einem autonomen mobilen Transportfahrzeug zu automatisieren, siehe Abb. 10. Das AMT-Fahrzeug bietet Komplettlösungen für die Automatisierung des Materialtransports vom Material-Supermarkt zur Fertigungsstraße und ermöglicht einen effizienten Materialtransport mit kurzen Reaktionszeiten. Dadurch werden die Arbeitskosten deutlich reduziert und die Pufferbereiche eingespart, die bei einem manuellen Mizusumashi-Prozess erforderlich sind.
Um den Nutzen eines AMT-Fahrzeugs noch weiter zu erhöhen, wird seine Fähigkeit der digitalen Verbindung mit Netzwerken genutzt. Hier wird auch vorgeschlagen, den Materialanforderungsprozess vom manuellen Betrieb mit Papierverfahren auf einen digitalen Prozess umzustellen. Da heute bei Bedienern, Technikern und Ingenieuren die Verwendung von Smartphones üblich ist, wird hier vorgeschlagen, eine App zu entwickeln, die an den mobilen Terminals zu Materialanforderungs- und Kommunikationszwecken installiert werden soll, siehe Abb. 11.. Um die Sicherheit in der Kommunikation zu gewährleisten, werden die Apps, AMT-Fahrzeuge und der Server an die lokalen Netzwerke von TE angeschlossen, wobei sich nur autorisierte Mitarbeiter zu Zwecken der Materialanforderung, Kommunikation und Überwachung an der App anmelden oder auf das System zugreifen können.

Daher wird eine Architektur für das autonome mobile Transportsystem vorgeschlagen wie in Abb. 12. Alle AMT-Fahrzeuge werden vom zentralen AMTS-Koordinierungssystem für die Aufgabenverteilung, Wegeplanung und Verkehrssteuerung verwaltet.
Die Apps sind auch an das zentrale AMTS-Koordinierungssystem angeschlossen. Sobald die Fertigungsstraßen Material über die mobile App anfordern, erhält der Bediener des Material-Supermarkts diese Anforderung und bereitet die Materialien vorab vor. Anschließend weist das zentrale AMTS-Koordinierungssystem ein AMT-Fahrzeug zu, das kommt und den Materialtransport
durchführt. Nachdem das AMT-Fahrzeug die Materialien erfolgreich an die Fertigungsstraße geliefert hat, bestätigen die Bediener diese Aufgabe, um das AMT-Fahrzeug wieder als Ressource freizugeben, damit es vom zentralen AMTS-Koordinierungssystem eingeplant werden kann.
DANKSAGUNGEN
Die Autoren danken Josef Sinder von Automotive BU und Tim Darr von AMT Harrisburg für ihre Anregungen und Hinweise. Die Autoren möchten außerdem dem Team von Automotive Suzhou für die Einführung der Notwendigkeit zur Umsetzung der Materialtransportautomatisierung für das Werk von Automotive Suzhou danken.
QUELLENANGABEN
[1] Wang, Lim Chee, Lim Ser Yong und Marcelo H. Ang. „Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment“. Intelligent Control, 2002. Proceedings of the 2002 IEEE International Symposium on. IEEE, 2002.
[2] Skiena, S. „Dijkstra’s algorithm“. Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. „Path planning with modified A star algorithm for a mobile robot“. Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. „Path planning for mobile robot navigation using voronoi diagram and fast marching“. Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on. IEEE, 2006.
[5] Warren, Charles W. „Global path planning using artificial potential fields“. Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev und Andrey V. Savkin. „Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey.“ Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. „Model predictive control“. Preprint (2002).
[8] Fox, Dieter, Wolfram Burgard und Sebastian Thrun. „The dynamic window approach to collision avoidance“. IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.
Entwicklung eines autonomen mobilen Transportsystems
KURZFASSUNG
Autonome mobile Roboter spielen eine wichtige Rolle beim flexiblen Materialtransport. Basierend auf der simultanen Positionsbestimmung und Kartenerstellung (Simultaneous Localization and Mapping, SLAM) entwickelte mobile Roboter können Karten erstellen, Routen planen und optimieren sowie Hindernisse vermeiden. Sie sind äußerst flexibel und agil zur Automatisierung der Werkslogistik einsetzbar, um den digitalen Wandel hinsichtlich der automatischen Lagerung und dem automatischen Transport von Materialien umzusetzen. Wir haben uns eingehend mit Navigationstechnologieanwendungen mit mobilen Robotern beschäftigt und aus einer strategischen Perspektive Lösungen zur Automatisierung der Mizusumashi-Prozesse (Linienversorger) entwickelt.
PROBLEMSTELLUNG
Beim herkömmlichen Ansatz für den Materialtransport erfolgt der Transport der Materialien vom Material-Supermarkt oder Lager in die Fertigungsbereiche durch einen Mizusumashi (Linienversorger). Abb. 1 zeigt einen allgemeinen Mizusumashi-Prozess, bei dem ein Bediener einen mit Materialkartons beladenen Handwagen in einem TE Werk zieht oder schiebt. Normalerweise werden die Materialien nicht direkt zu den Fertigungsstraßen, sondern zunächst in einen Pufferbereich gebracht, siehe Abb. 2. Die Fertigungsstraßen holen die Materialien aus dem Pufferbereich ab. Sobald keine ausreichende Menge an Materialien für die nächsten zwei oder mehr Stunden für die Produktion vorhanden ist, bringt die Fertigungsstraße ein Etikett im Pufferbereich an, um weitere Materialien anzufordern. Die Materialversorger prüfen die Verfügbarkeit der Materialien im Pufferbereich, sobald sie die Materialanforderung sehen oder erhalten, und fordern die Materialien im Material-Supermarkt oder Lager an. Dabei wird der Transport der Materialen von einem Mizusumashi übernommen. Der konventionelle Ansatz ist also arbeitsintensiv und wenig effizient. Außerdem müssen in der Regel viele verschiedene Arten von Materialien verwaltet werden, und die Lokalisierung der Materialien ist aufwendig, was die Effizienz des Materialtransports ebenfalls beeinflusst. Was aber noch schlimmer sein kann: Der manuelle Mizusumashi kommt der Materialanforderung nicht rechtzeitig nach und die Fertigungsstraßen müssen auf die Materialien warten, was die Produktivität der Fertigungsstraßen beeinträchtigt.
Die Automatisierung und digitale Transformation würden wesentlich dazu beitragen, die Effizienz des Materialtransports zu verbessern und die Reaktionszeit zu verkürzen. Autonome mobile Roboter, die sich selbstständig bewegen und durch digitale Verbindungen mit den Fertigungsstraßen und MES-Systemen erweitert werden können, sind eine ausgezeichnete Alternative zu manuellen Mizusumashi-Prozessen. Es gibt generell vier wichtige verschiedene Arten von Navigationstechnologien: Festweg-Navigation, Laserzielnavigation, Trägheitsnavigation und SLAM-Navigation, siehe Tabelle 1.. Die Festweg-Navigation, für die magnetische Bänder auf dem Boden angebracht werden müssen, um den mobilen Roboter zu leiten, weist die geringste Mobilität und Flexibilität auf. Bei der Laserzielnavigation reflektiert ein Laserziel einen Laserstrahl an den Roboter zur genauen Ortsbestimmung. Diese Methode weist eine geringe Kompatibilität mit der Umgebung auf, d. h., wenn sich die Laserzielposition ändert oder durch andere Hindernisse blockiert wird, ist die präzise Navigation des mobilen Roboters sehr schwierig. Die Trägheitsnavigation, für die auf dem Boden magnetische Nägel oder QR-Codes angebracht werden müssen, weist eine bessere Kompatibilität mit Umgebungsänderungen auf, ist aber nur in Bereichen anwendbar, die mit magnetischen Nägeln oder QR-Codes ausgestattet sind. Die SLAM-Navigation, bei der die Karte zur Wegfindung, Hindernisvermeidung und autonomen Navigation in Echtzeit aktualisiert werden kann, weist die höchste Kompatibilität mit der Umgebung und die höchste Flexibilität zur autonomen Bewegung auf. Sie ist eine optimale Navigationstechnologie für den flexiblen Materialtransport in Fertigungsbereichen, in denen häufig Interaktionen mit Personen oder anderen mobilen Geräten stattfinden können. Tabelle 1 vergleicht verschiedene Navigationstechnologien. Unser Ziel ist es, auf SLAM-Navigation basierende autonome mobile Transportsystemen für TE zu entwickeln.
METHODEN UND ERGEBNISSE
Modernste Navigationstechnologie für mobile Roboter
Auf Ortsbestimmung und Umgebungswahrnehmung basierte Navigation ist ein hochrangiges Forschungsthema in der Robotik. Im Allgemeinen ist eine globale Wegplanung gut darin, einen optimierten Weg zu erstellen, aber schlecht darin, auf unbekannte Hindernisse zu reagieren. Im Gegensatz dazu funktioniert eine lokale/reaktive Navigationsmethode in einer dynamischen und zunächst unbekannten Umgebung gut, aber ist insbesondere in komplexen Umgebungen[1] wenig leistungsfähig. Diese Studie untersucht globale und lokale Wegeplanungsalgorithmen und schlägt eine hybride Navigationsmethode vor.
Die globale Wegeplanung wurde theoretisch eingehend untersucht und in vielen praktischen Fällen angewandt. Häufig wird ein graphbasierter Algorithmus verwendet, z. B. Dijkstra[2], A*[3] und Voronoi[4], die normalerweise auf einer begrenzten Fläche verwendet werden. APF-Methoden (Artificial Potential Field)[5] nutzen mehr Umgebungsinformationen und sind für die Echtzeitnavigation geeignet.
Die von APF erstellten Bewegungsbahnen sind jedoch in der Regel nicht optimal. Der Markov-Entscheidungsprozess ist eine probabilistische Methode, bei der sich die Entscheidung nur auf den letzten Zustand bezieht und nichts mit früheren Zuständen zu tun hat. Außerdem werden einige andere globale Wegeplanungsalgorithmen[6] zum Erreichen des Ziels diskutiert.
Die lokale Wegeplanung beschäftigt sich mit der Hindernisvermeidung in einer lokalen Umgebung. Model Predictive Control (MPC) [7] wird aufgrund ihrer Robustheit und Konvergenz bei der Wegeplanung zunehmend bei der Navigation autonomer mobiler Roboter eingesetzt. Der Grundgedanke von MPC ist es, für die Wegeplanung die Zukunft mit individuellen Modellen vorherzusagen, und dann eine erste Kontrolle der entsprechenden vom mobilen Roboter gewählten Bewegungsbahn durchzuführen. Dynamic Window Approach (DWA)[8], die Dynamik-Fenster-Methode, wertet jede Bewegungsbahn aus und wählt dann die Bahn mit der höchsten Punktzahl aus. Sie ist nicht nur ein unabhängiger Algorithmus, sondern auch Bestandteil von MPC. DWA geht jedoch davon aus, dass alle Hindernisse statisch sind, was für die Vermeidung von dynamischen Hindernissen mit relativ hoher Geschwindigkeit nicht anwendbar ist. Algorithmen wie „Velocity Obstacle“ und Kollisionskegel gehen davon aus, dass sich Hindernisse mit einer bestimmten Geschwindigkeit und Beschleunigung bewegen.
In den meisten TE Werken, in denen die Anordnung der Ausrüstung und Fertigungsstraßen natürlich relativ statisch und die Umgebungen bekannt sind, aber auch unvorhersehbare Bewegungen der Gerätebediener, die als dynamische Hindernisse gelten, erfolgen können, würde weder der globale noch der lokale Wegeplanungsansatz gut für die Navigation der mobilen Roboter funktionieren. Für die Navigation ist die Entwicklung einer Hybrid-Methode mit einer kombinierten lokalen und globalen Wegeplanung erforderlich.
Grundlage der autonomen Navigation – Kartenerstellung
Wenn der autonome mobile Roboter in einer unbekannten Umgebung eingesetzt wird, um selbstständig den Weg zum Ziel zu finden, muss der Roboter die gesamte Umgebung durchqueren, bis er das Ziel erreicht. Während einige neue Ziele hinzugefügt und gesetzt werden, sollte der Roboter nicht jedes Mal die Umgebung durchqueren, da dies hohe Rechenzeit- und Speicherplatzkosten verursacht.
Darüber hinaus ist das Ziel in der Regel eine relative Position in Bezug auf den mobilen Roboter bei der Navigation durch die Umgebung. Daher ist es wichtig, einen Umgebungsdeskriptor, z. B. eine Karte, zu verwenden, um die Umgebungsinformationen aufzuzeichnen und zu beschreiben, damit der Roboter weiß, wo er ist und wohin genau er gehen soll. Es gibt verschiedene
Kartenarten, z. B. Feature-Karten, topologische Karten, Grid-Karten und die erscheinungsbasierte Methode. Die Feature-Karte, die die Umgebung mit wichtigen Punkten, Linien oder Flächen beschreibt, ermöglicht eine anschauliche Darstellung.
Eine topologische Karte beschreibt die Knoten und die Konnektivität der Umgebung. Die erscheinungsbasierte Methode berechnet die Pose der Roboter direkt. Die Grid-Karte berücksichtigt sowohl die Einfachheit als auch die Visualisierung bei der Darstellung der Umgebung. Daher ist eine Grid-Karte die optimale Wahl als Umgebungsdeskriptor für die Navigation der mobilen Roboter. In diesem Abschnitt wird der Ansatz für die Kartenerstellung einer unbekannten Umgebung untersucht, um eine Grid-Karte zu erhalten.
Wenn keine Vorkenntnisse der Umgebung vorhanden sind, spielt die simultane Positionsbestimmung und Kartenerstellung (Simultaneous Localization and Mapping, SLAM), die die Karte der unbekannten Umgebung erstellt und gleichzeitig die Pose des Roboters verfolgt, eine entscheidende Rolle bei der Kartenerstellung. Bei unserer Methode wird der Rao-Blackwellized-Partikelfilter für SLAM eingesetzt, um die Zuverlässigkeit und Qualität der Karte zu gewährleisten. Einer der häufigsten Partikelfilter-Algorithmen ist der SIR-Filter (Sampling Importance Resampling). Die Kartierung mit einem Rao-Blackwellized-SIR-Filter wird in folgende Schritte unterteilt:
- Sampling: Die aktuelle Pose des Roboters xt(i) wird aus der letzten Pose des Roboters xt-1(i) durch die Vorschlagsverteilung π(xt|z1:t,u0:t) berechnet.
- Bedeutungsgewichtung: Jedes Partikel wird anhand seiner Gewichtung formuliert, siehe Gleichung (1).
- Resampling: Um unendliche Partikel zu verhindern und die Konvergenz des Algorithmus zu gewährleisten, sollte die Menge der Partikel reduziert werden, und die Partikel von geringer Gewichtung werden durch die Partikel hoher Gewichtung für den Resampling-Prozess ersetzt.
- Kartenschätzung: Die aktuelle Karte mt(i) wird anhand der historischen Beobachtungen z1:t und Posen x1:t geschätzt.
Daher besteht die Grundidee des Rao-Blackwellized-Partikelfilters darin, eine A-posteriori-Wahrscheinlichkeit der Karten und Bewegungsbahnen zu berechnen, siehe Gleichung (2).
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Dabei ist u0:t die Sequenz der Odometrie-Messungen einschließlich der Anfangspose, z1:t ist die Sequenz der Beobachtungen, x1:t beschreibt die möglichen Bewegungsbahnen und m stellt die Karte dar.
Eine Simulationsumgebung wird konstruiert, um den Kartenerstellungsalgorithmus zu überprüfen, siehe Abb. 3. Der mobile Roboter bewegt sich im freien Raum, die Umgebung wird durch umgebende Wände begrenzt und die Felder im Inneren stellen verschiedene Stationen dar, die mögliche Hindernisse repräsentieren. Der blau dargestellte Bereich in Abb. 3 ist der Erfassungsbereich des mobilen Roboters. Durch die Anweisung des mobilen Roboters, sich in dieser Simulationsumgebung zu bewegen, wird die Grid-Karte auf Basis von SLAM-Technologien erstellt, siehe Abb. 4..
Wegeplanung in bekannter Umgebung
Mit der Verfügbarkeit der Karte für die Umgebung wird die Ausgangsposition des mobilen Roboters oft als Startpunkt gesetzt, und das Ziel wird als Endpunkt auf der Karte gesetzt, um den Weg zu erstellen, den der Roboter folgen soll. Einen für den Roboter zugänglichen Weg vom Startpunkt zum Endpunkt unter Berücksichtigung der Roboterdynamik und der Umgebung zu finden und den Roboter anzuweisen, diesen Weg zu benutzen, wird als globale Wegeplanung und lokale Wegeplanung bezeichnet.
Bei der globalen Wegeplanung sind der Dijkstra-Algorithmus und A*-Algorithmus zwei wichtige Methoden zur Ermittlung des kürzesten Wegs. Diese Algorithmen verfügen über Breitensuche bzw. Tiefensuche. Diese Verfahren werden unten kurz beschrieben, siehe Tabelle 2..
Kurze Beschreibung des Dijkstra- und A*-Algorithmus
Tabelle 2
| Dijkstra-Algorithmus | A*-Algorithmus |
|---|---|
(1) Setzen Sie den anfänglichen Abstandswert zu jedem Knoten: Weisen Sie dem Startknoten 0 und den anderen unendlich zu. (2) Setzen Sie den Startknoten als aktuellen Knoten, und markieren Sie alle anderen Knoten als nicht besucht. (3) Finden Sie für den aktuellen Knoten den nächstgelegenen Knoten, dessen Entfernung zum besuchten Knoten am kürzesten ist. (4) Markieren Sie den nächstgelegenen Knoten als besucht, damit er nicht wieder überprüft wird. (5) Wenn der Zielknoten als besucht markiert wurde, ist die Suche beendet. Andernfalls wiederholen Sie Schritt (3). |
(1) Setzen Sie den anfänglichen Knoten als aktuellen Knoten. Berechnen Sie das Gewicht für seine Nachbarn mit f(n) = g(n) + h(n). Dabei sind g(n) die Kosten für den Weg vom Startknoten, und ℎ(n) sind die geschätzten Kosten von n zum Ziel. (2) Setzen Sie den Knoten mit der geringsten Gewichtung als aktuellen Knoten, und fahren Sie mit Schritt (1) fort. (3) Wiederholen Sie die Schritte (1) und (2), bis als aktueller Knoten das Ziel identifiziert wird. |
Mit beiden Methoden kann theoretisch ein für den Roboter zugänglicher Weg erstellt werden. Ein zugänglicher Weg bedeutet jedoch nicht, dass es zugleich ein ausführbarer Weg ist. Die lokale Wegeplanung baut eine Brücke zwischen dem zugänglichen und dem ausführbaren Weg. In dieser Studie wird der Dynamik-Fenster-Algorithmus verwendet, der folgende Schritte umfasst:
- Diskretes Sampling im Robotersteuerraum
- Prognose dessen, was für jedes mögliche Sample passieren würde (mit Vorabschätzung)
- Bewertung der Kandidaten für Bewegungsbahnen hinsichtlich der Distanz und der Übereinstimmung mit dem globalen Weg
- Auswahl der Bewegungsbahn mit der höchsten Punktzahl
- Wiederholung aller genannten Schritte
Für die Erstellung des ausführbaren Wegs weist die lokale Wegeplanung große Vorteile bei der Hindernisvermeidung auf. Wenn der mobile Roboter dem globalen Weg folgt, wird durch lokale Beobachtungen die lokale Karte erstellt, sodass neue oder unvorhergesehene Hindernisse auf der lokalen Karte markiert werden. Dann generiert die lokale Wegeplanung einen lokalen Weg, um Kollisionen mit diesen Hindernissen zu vermeiden. In diesem Fall kann der Roboter sowohl statische als auch dynamische Hindernisse von geringer Geschwindigkeit vermeiden.
Simulation der autonomen Navigation
Eine Simulationsumgebung, wie in Abb. 3 dargestellt, wird eingerichtet, und die Umgebungskarte wurde in Abschnitt II.B basierend auf dem SLAM-Algorithmus erstellt. Der Wegeplanungsalgorithmus wird für die Karte getestet, wobei der Dijkstra-Algorithmus für diesen Teil implementiert und verifiziert ist. Zuerst wird die aktuelle Pose des Roboters in der Karte konfiguriert und als Startpunkt gesetzt.
Der Roboter wird angewiesen, dem Weg zu folgen, der über die globale Wegeplanung geplant wird, nachdem das Ziel festgelegt ist. Wie in Abb. 5 dargestellt, ist der blaue Weg der globale Weg vom Start bis zum Ziel, während der gelbe Weg der lokale Weg ist, der dem globalen Weg folgt. Basierend auf mehreren Testläufen zur Verifizierung wird der Schluss gezogen, dass der Ansatz von Dijkstra einen zugänglichen globalen Weg generieren konnte
und dass der von DWA generierte lokale Weg als ausführbarer Weg erstellt werden konnte und somit dem globalen Weg entspricht.
Hier wird auch die Fähigkeit zur Vermeidung von Hindernissen bewertet. Wie in Abb. 6 dargestellt, erscheint direkt vor dem Roboter ein unvorhergesehenes Hindernis, das nicht auf der Karte markiert ist. Das Hindernis befindet sich im Erfassungsbereich des Laser-Abtasters und wird vom Roboter erkannt, siehe Abb. 7.. Um zu prüfen, ob der Roboter in der Lage ist, eine Kollision mit dem neuen Hindernis
zu vermeiden und an ihm vorbeizukommen, wird ein Ziel direkt hinter dem entdeckten Hindernis konfiguriert, um zu überprüfen, wie der Roboter auf das unvorhergesehene Hindernis reagiert, um das Ziel zu erreichen. Durch die Ausführung der lokalen Wegeplanung wird eine lokale Karte erstellt, siehe Abb. 8. Dabei wird das Hindernis in der lokalen Karte aufgenommen. Die gelbe Kurve ist der lokale Weg, der zur Vermeidung des Hindernisses erstellt wird. Es wurde festgestellt, dass sich der Roboter nicht direkt vorwärts bewegt, um eine Kollision mit dem Hindernis zu verursachen, sondern dass er einem angepassten Weg folgt, indem er sich um das Hindernis herum bewegt, ohne mit dem Hindernis zu kollidieren. Dies zeigt die Fähigkeit des Roboters, statische Hindernisse zu umgehen. Es wurde aber auch getestet, was passiert, wenn der Roboter auf dynamische Hindernisse trifft, die sich auf der Karte mit einer relativ niedrigen Geschwindigkeit bewegen können. Die Testergebnisse zeigen, dass der Roboter in der Lage ist, seine lokale Karte mit dem lokalen Weg zu aktualisieren, um Kollisionen mit den dynamischen Hindernissen zu vermeiden. Die Simulationsergebnisse bestätigen den hybriden Ansatz, der eine Kombination aus globaler und lokaler Wegeplanung zur Roboterwegeplanung und Hindernisvermeidung beinhaltet.
ERÖRTERUNG UND KERNASPEKTE
Autonomes mobiles Transportfahrzeug
Wichtige Technologien, die in Abschnitt II zur Kartenerstellung und Wegeplanung mit SLAM entwickelt und überprüft wurden, verbessern die Fähigkeit der autonomen Navigation für den mobilen Roboter. Wie in Tabelle 1 dargestellt, müssen bei der SLAM-basierten Navigationstechnologie auf dem Boden keine Magnetbänder, Magnetnägel oder QR-Codes oder Laserziele an Wänden oder ortsfesten Stellen angebracht werden. SLAM ist vollständig in der Lage, die Karte einer Umgebung automatisch zu erstellen und dabei Kollisionen mit unvorhergesehenen Hindernissen zu vermeiden, die nicht auf der Karte markiert sind. SLAM-basierte mobile Roboter sind die optimale Alternative, die zur Entwicklung eines autonomen mobilen Transportsystems verwendet werden sollte.
In allen Unternehmenssparten von TE wurde eine Umfrage bezüglich der Anforderungen an den autonomen mobilen Materialtransport durchgeführt. Als hohe Prioritäten beim Materialtransport wurden dabei folgende Punkte genannt: den mobilen Roboter dazu zu bringen, den Warenkorb oder das Regal zu transportieren, den Wagen zu ziehen und einen Manipulator zu integrieren, um die Materialien zu bedienen, siehe Tabelle 3(a). Wichtige Funktionen mit einer hohen Priorität, die im autonomen mobilen Roboter implementiert werden müssen, sind demnach die Verbindung mit MES, autonome Navigation und die automatische Kartenerstellung, siehe Tabelle 3(b). Die Automatisierung des Mizusumashi-Prozesses mit einem mobilen Roboter wurde als hohe Priorität von allen Unternehmenssparten bewertet. Wie in Abb. 9 dargestellt, ist der Mizusumashi-Prozess der
kritischste Prozess für den Materialtransport vom Lager/Material-Supermarkt in die Fertigungsbereiche. Hier wird vorgeschlagen, basierend auf der SLAM-Navigationstechnologie ein autonomes mobiles Transportfahrzeug zu entwickeln, das das Regal für den flexiblen Materialtransport transportieren kann (siehe Abb. 10). Das autonome Fahrzeug kann eine Traglast von mehr als 300 kg befördern und sich mit einer Geschwindigkeit von 0,8 bis 1 m/s im Werk bewegen. Es handelt sich damit um eine äußerst effiziente und wirkungsvolle Alternative, um den manuellen Mizusumashi-Prozess zu ersetzen.
Autonomes mobiles Transportsystem
Mit der Verfügbarkeit autonomer mobiler Transportfahrzeuge liegt die Lösung darin, die Fahrzeuge als Teil des autonomen Transportsystems (AMTS) zu integrieren, um schlüsselfertige Lösungen für TE Werke zu entwickeln. Abb. 9 veranschaulicht den Gesamtprozess für den Materialtransport. In der Regel muss der Bediener die Materialkartons auspacken und die Materialien im
Lager sortieren und dann die sortierten Materialien in die im Material-Supermarkt gelagerten Kartons räumen. Beim manuellen Mizusumashi-Prozess transportieren die Linienversorger die Materialien vom Material-Supermarkt in den Pufferbereich. Die Fertigungsstraßen holen die Materialien aus dem Pufferbereich ab.
Da bisher nahezu kein TE Werk keinen Teil des Prozesses
vom Lager zur Fertigungsstraße automatisiert hat, wird hier zunächst vorgeschlagen, den Mizusumashi-Prozess mit einem autonomen mobilen Transportfahrzeug zu automatisieren, siehe Abb. 10. Das AMT-Fahrzeug bietet Komplettlösungen für die Automatisierung des Materialtransports vom Material-Supermarkt zur Fertigungsstraße und ermöglicht einen effizienten Materialtransport mit kurzen Reaktionszeiten. Dadurch werden die Arbeitskosten deutlich reduziert und die Pufferbereiche eingespart, die bei einem manuellen Mizusumashi-Prozess erforderlich sind.
Um den Nutzen eines AMT-Fahrzeugs noch weiter zu erhöhen, wird seine Fähigkeit der digitalen Verbindung mit Netzwerken genutzt. Hier wird auch vorgeschlagen, den Materialanforderungsprozess vom manuellen Betrieb mit Papierverfahren auf einen digitalen Prozess umzustellen. Da heute bei Bedienern, Technikern und Ingenieuren die Verwendung von Smartphones üblich ist, wird hier vorgeschlagen, eine App zu entwickeln, die an den mobilen Terminals zu Materialanforderungs- und Kommunikationszwecken installiert werden soll, siehe Abb. 11.. Um die Sicherheit in der Kommunikation zu gewährleisten, werden die Apps, AMT-Fahrzeuge und der Server an die lokalen Netzwerke von TE angeschlossen, wobei sich nur autorisierte Mitarbeiter zu Zwecken der Materialanforderung, Kommunikation und Überwachung an der App anmelden oder auf das System zugreifen können.
Daher wird eine Architektur für das autonome mobile Transportsystem vorgeschlagen wie in Abb. 12. Alle AMT-Fahrzeuge werden vom zentralen AMTS-Koordinierungssystem für die Aufgabenverteilung, Wegeplanung und Verkehrssteuerung verwaltet.
Die Apps sind auch an das zentrale AMTS-Koordinierungssystem angeschlossen. Sobald die Fertigungsstraßen Material über die mobile App anfordern, erhält der Bediener des Material-Supermarkts diese Anforderung und bereitet die Materialien vorab vor. Anschließend weist das zentrale AMTS-Koordinierungssystem ein AMT-Fahrzeug zu, das kommt und den Materialtransport
durchführt. Nachdem das AMT-Fahrzeug die Materialien erfolgreich an die Fertigungsstraße geliefert hat, bestätigen die Bediener diese Aufgabe, um das AMT-Fahrzeug wieder als Ressource freizugeben, damit es vom zentralen AMTS-Koordinierungssystem eingeplant werden kann.
DANKSAGUNGEN
Die Autoren danken Josef Sinder von Automotive BU und Tim Darr von AMT Harrisburg für ihre Anregungen und Hinweise. Die Autoren möchten außerdem dem Team von Automotive Suzhou für die Einführung der Notwendigkeit zur Umsetzung der Materialtransportautomatisierung für das Werk von Automotive Suzhou danken.
QUELLENANGABEN
[1] Wang, Lim Chee, Lim Ser Yong und Marcelo H. Ang. „Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment“. Intelligent Control, 2002. Proceedings of the 2002 IEEE International Symposium on. IEEE, 2002.
[2] Skiena, S. „Dijkstra’s algorithm“. Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. „Path planning with modified A star algorithm for a mobile robot“. Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. „Path planning for mobile robot navigation using voronoi diagram and fast marching“. Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on. IEEE, 2006.
[5] Warren, Charles W. „Global path planning using artificial potential fields“. Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev und Andrey V. Savkin. „Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey.“ Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. „Model predictive control“. Preprint (2002).
[8] Fox, Dieter, Wolfram Burgard und Sebastian Thrun. „The dynamic window approach to collision avoidance“. IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.