
Druckmessumformer für ROV / AUV / UUV
TE Connectivity (TE) fertigt Druckmessumformer für den Einsatz in kabelgeführten Unterwasserfahrzeugen (ROV) mit einem tauchfesten, nass steckbaren Steckverbinder.
Die Unterwassertiefe kann mit einem Drucksensor gemessen werden. Der Druckanschluss eines ins Wasser gelassenen ROV (Remotely Operated Vehicle) – kabelgeführten Unterwasserfahrzeugs – ist typischerweise entweder in einem Gehäuse mit Verbindung zu einem Hydraulikkreis untergebracht, oder er ist vollständig dem Meerwasser ausgesetzt. Beim Eintauchen des ROV wirkt der Wasserdruck bzw. Hydraulikdruck auf die Membran des Drucksensors. Je tiefer das System untergetaucht wird, desto höher wird der Druck. Durch Berechnung der Salzwasserdichte mit 1,025 (bzw. einer um 2,5 % höheren Dichte als Süßwasser bei 4 °Celsius) kann im Zusammenhang zwischen Druck und Ausgangssignal daraus die Tauchtiefe der Ausrüstung ermittelt werden kann.
ÜBERLEGUNGEN ZUM WERKSTOFF DES SENSORS
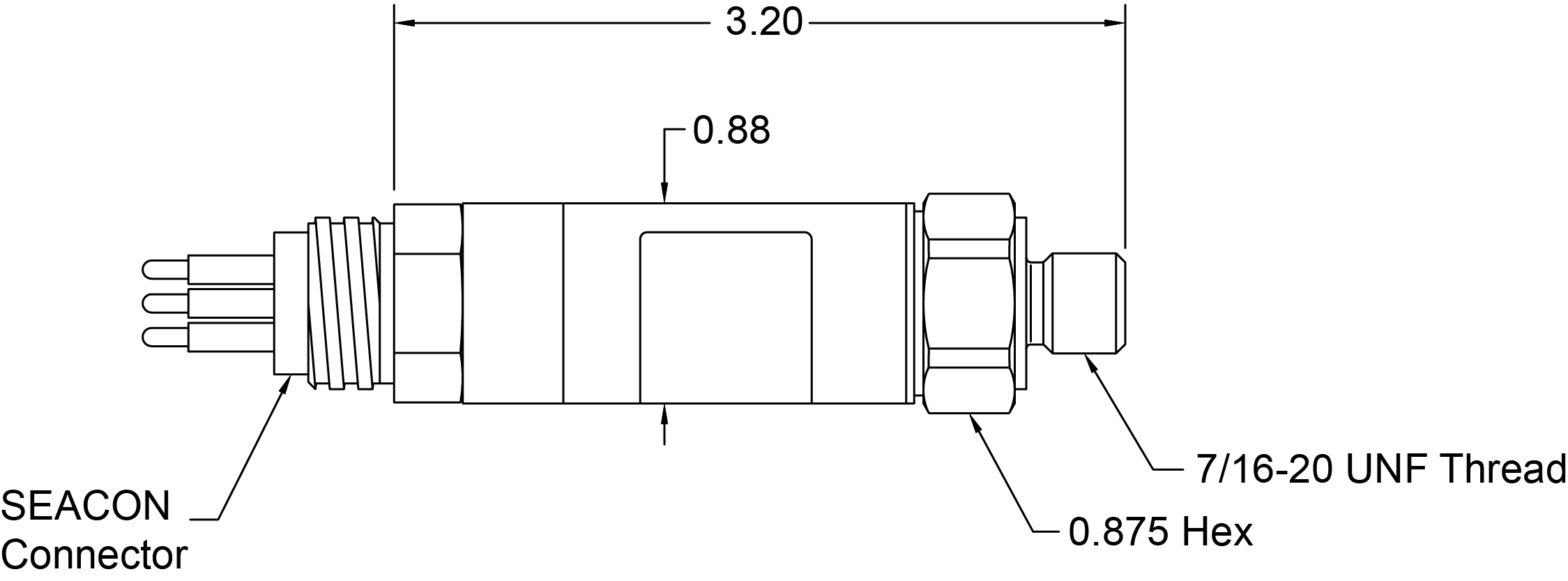
Damit in Salzwasser getauchte Drucksensoren in dieser Umgebung bestehen können, sind bestimmte mechanische Aspekte zu berücksichtigen. Da Salzwasser korrodierend wirkt, ist insbesondere das Sensormaterial von Belang. TE baut einen Sensor mit allen benetzten Teilen, einschließlich druckfühlendes Element, Gehäuse und elektrische Verbindung, komplett aus 316L-Edelstahl. Durch das geringe Sauerstoffvorkommen tief im Meer und die ständige Bewegung des Wassers sind Loch- und Spaltkorrosion minimal. Erst beim Hochholen der Ausrüstung wird Sauerstoff aus der Atmosphäre zugeführt, und der Korrosionsprozess setzt ein. Bei entsprechender Wartung (Spülen der Ausrüstung einschließlich Sensor) überlebt der Sensor.
KUNDENSPEZIFISCHE SENSOREN
Die Sensoren können zudem so konzipiert werden, dass sie innerhalb des Hydraulikkreises eingebettet sind. Bei bestimmten Anwendungen ist der Prozessanschluss in eine Hydraulikleitung geschraubt, wobei die Gegenseite der Membran mit nicht leitfähiger Hydraulikflüssigkeit in Berührung kommt. Dies ergibt im Prinzip einen Differenzdruck-Messumformer, der den Hydraulikdruck bezogen auf die Flüssigkeit misst.
