Whitepaper
Noções básicas sobre sensores
Um guia de designer LiDAR de tecnologias de sensor para sistemas automotivos/de mobilidade

Os sistemas LiDAR de hoje estão encontrando novos usos, desde a segurança até o mapeamento e a automação industrial. Um sector com níveis especialmente elevados de interesse e desenvolvimento: o mercado da mobilidade. Os scanners LiDAR são componentes críticos em sistemas protótipos para veículos autônomos, bem como em sistemas atuais para piloto automático adaptativo (ACC – Adaptive Cruise Control), sistemas de prevenção de colisão, reconhecimento de sinais de trânsito, detecção de ponto cego e aviso de saída de faixa. Nenhum desses sistemas baseados em LiDAR pode funcionar sem um componente-chave: seus sensores – os "olhos" do sistema. Este paper vai se concentrar em como engenheiros de design de fabricantes de equipamentos originais (OEMs – Original Equipment Manufacturers) de sistemas LiDAR podem escolher tecnologias de sensores diferentes.
Histórico
Os sistemas de detecção e variação de luz (LiDAR – Light Detection And Ranging) devem detectar confiável e rapidamente o ambiente, montados conforme detalhado em uma imagem dada a viabilidade econômica do entorno imediato e da estrada à frente. Muito à frente: sistemas montados em carros em deslocamento rápido precisam "ver" a pelo menos 150 metros (quase 500 pés) à frente e detectar objetos pequenos, de até 10 centímetros (aproximadamente 4 polegadas) de altura.
Tudo isso apresenta requisitos técnicos desafiadores para os sensores dos sistemas.
A missão exige sistemas de sensor complementares, mas independentes, com segurança funcional e qualificação ambiental garantidas. Por exemplo, as unidades devem ter classificação nominal para temperaturas de operação de -40 a 125 °C (-40 a 257 °F) para acomodar o aquecimento ambiental e o calor de outros componentes do sistema. Os sensores devem possuir uma relação sinal-ruído ideal, para "ver" o sinal através de qualquer fundo que distraia. E como os detectores ópticos devem estar preparados para lidar com níveis de luz ambiente diferentes, os sensores devem possuir uma ampla faixa dinâmica.
(O termo "detector" pode se referir apenas ao elemento de detecção fotoelétrico, e "sensor" inclui o detector mais componentes eletrônicos próximos que oferecem funções como conectividade. Às vezes, os termos são usados de maneira intercambiável.)

LIDAR em ação
Além da física básica, os designers de sistema LiDAR também devem levar em consideração economia básica. Todos os componentes do carro devem ser econômicos ao máximo. Para fins práticos, a melhor relação custo/desempenho supera a melhor tecnologia. Todos os sistemas de mobilidade automotiva atuais que usam LiDAR de longo alcance são dispositivos de "varredura", que movem o feixe de laser passo a passo por toda a cena. Alcance efetivo usando a tecnologia atual: de 30 a 300 m (aproximadamente de 100 a 1.000 pés). Quase todos são lasers de 905 aproximadamente nanômetros (nm). Eles emitem feixes invisíveis, estão disponíveis a baixo custo em grandes volumes e usam alta potência para pulsos curtos (por exemplo, pico de 75 W por 5 nanossegundos), apresentando uma relação de potência/custo ideal. Esses lasers têm sido muito usados com tecnologia de detector de silício madura e barata.
Seleção da melhor tecnologia de sensor
À medida que o setor avança, os designers estão aplicando diversas tecnologias de sensor diferentes para sistemas de mobilidade LiDAR. Cada um tem vantagens e desvantagens, conforme descrito abaixo.
Detectores de diodo PIN de silício
Estes detectores à base de silício possuem uma estrutura com três tipos de semicondutor em camadas: tipo P/intrínseco/tipo N.
Eles demonstram bom alcance dinâmico, com a capacidade de lidar com volumes de luz muito variáveis. Por exemplo, eles podem detectar o reflexo de um objeto distante, mesmo quando submetidos à luz solar direta. E são relativamente baratos.
No entanto, eles não podem oferecer os níveis de largura de banda elevados ou desempenho sinal/ruído que a maioria dos sistemas LiDAR de mobilidade modernos exigem. Por fim, eles não são nem muito sensíveis, nem muito rápidos.
Detectores de fotomultiplicador de silício (SiPM – Silicon Photomultiplier) e de diodo de avalanche de fóton único (SPAD – Single-Photon Avalanche Diode)
Os fabricantes desenvolveram originalmente esses sensores de estado sólido à base de silício para aplicações científicas e médicas pequenas e especializadas. Mais recentemente, eles tentaram testá-los no mercado LiDAR maior.
Esses sensores funcionam de maneira semelhante a Avalanche Photodiode Sensors) (veja abaixo), mas são otimizados para amplificação ou ganho interno muito alto, incapacitando-os de detectar as menores quantidades de luz. Eles também são muito rápidos. Por fim, eles são compatíveis com a tecnologia CMOS amplamente disponível e, assim, podem ser pareados com componentes eletrônicos associados no mesmo chip.
No entanto, a sensibilidade dos contadores de fóton único é muito menor do que a dos Avalanche Photodiode Sensors). Por isso, eles devem contar com uma multiplicação muito alta. Infelizmente, o processo de multiplicação adiciona ruído que, muitas vezes, degrada significativamente a relação sinal/ruído. O mecanismo de amplificação também é propenso a falsos gatilhos causados por altas temperaturas. Talvez a desvantagem mais séria desses sensores: o ganho elevado vem às custas de problemas de saturação.
Para começar, os sensores devem lidar com a luz laser refletida de objetos à frente. Além disso, muitos sistemas LiDAR especificam scanners com campos de visão amplos. Isso coloca uma grande quantidade de luz adicional sobre um sensor SIPM ou SPAD. E alguns fenômenos muito encontrados em ambientes de mobilidade LiDAR, como luz solar brilhante, faróis altos ou outros sistemas LiDAR, podem saturar o sensor com níveis de luz mais altos do que ele pode suportar, mesmo quando se usam filtros ópticos. À medida que o trabalho de desenvolvimento para compensar suas desvantagens continua, esses sensores normalmente são levados em consideração para várias aplicações LiDAR. Mas, até o momento, os problemas de saturação e outros mencionados acima os impedem de se tornarem os detectores escolhidos para LiDAR da varredura de longo alcance.
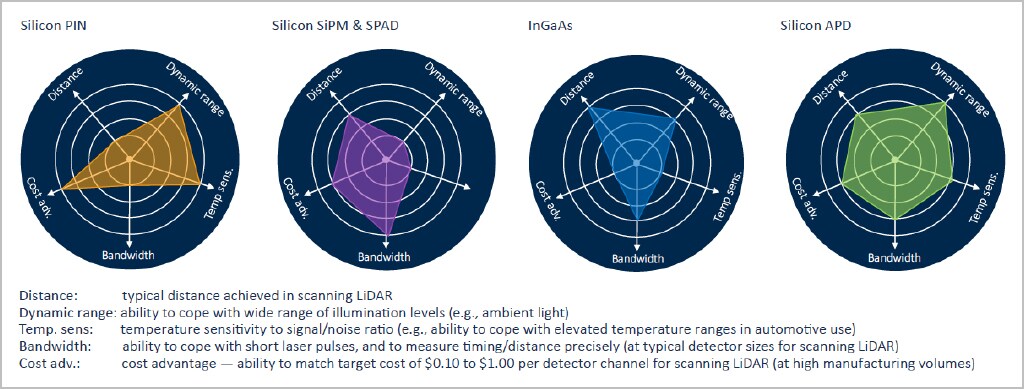
Figura 2 Comparação das tecnologias de detecção
Detectores de fotodiodo de arseneto de gálio e índio (InGaAs – Indium Gallium Arsenide)
Estes sensores normalmente são utilizados em tamanhos pequenos em fibras de vidro de telecomunicação, mas são recém-chegados ao LiDAR, exceto para aplicações militares ou aeroespaciais especializadas. Essa tecnologia abandona a construção convencional à base de silício para o material InGaAs.
Com sistemas a laser especialmente construídos para o espectro mais alto (1.550 nm em comparação com 905 nm para os outros sensores debatidos aqui), esse design deve ser mais sensível e capaz de emitir mais energia. Assim, ele pode possibilitar um sistema LiDAR automotivo com um alcance maior do que a maioria de outros sensores.
No entanto, o desempenho do detector InGaAs pode diminuir muito até mesmo por temperaturas ambientes um pouco mais altas do que o normal. O sensor pode muito bem precisar de um sistema de refrigeração externo, mesmo em climas temperados.
Além disso, o material base é bem mais caro do que os substratos de silício mais usados. E fabricar sensores InGaAs em tamanhos grandes para uso LiDAR exigiria uma fabricação muito mais complexa do que designs de silício. Até o momento, eles não foram feitos com êxito em grandes volumes comerciais.
Por fim, como essa tecnologia é nova no mundo LiDAR automotivo, os OEMs teriam que estar preparados para gastar tempo, esforço e receita substanciais tentando desenvolver um novo sistema LiDAR referente a qualquer detector InGaAs.
Detectores de Fotodiodo de Avalanche (APD – Avalanche Photodiode)
Originalmente aperfeiçoados para aplicações industriais e militares, esses fotodetectores à base de silício funcionam permitindo que fótons de entrada disparem uma avalanche de carga, multiplicando o ganho pelo mecanismo de amplificação interno. A estrutura otimizada para absorção converte pelo menos 80% da luz refletida de 905 nm de um laser em corrente fotoelétrica. Resultado: sensibilidade muito aumentada.
Além da sensibilidade notável, os APDs têm uma ótima relação sinal-ruído, saturação mínima e velocidade muito boa. Eles também estão entre as tecnologias de sensor de menor custo disponíveis.
Uma desvantagem em potencial: (APDs – Avalanche Photodiode Detectors) usam tecnologia bipolar especializada não compatível com a fabricação comum de CMOS. Assim, eles só podem ser obtidos de um pequeno número de fornecedores. E eles não podem ser pareados no mesmo chip com os eletrônicos CMOS associados.
No entanto, fornecedores experientes podem fabricar pacotes com sensores e componentes eletrônicos em chips próximos. Ambos podem ser otimizados para o melhor desempenho da categoria, sem compromissos. Por exemplo, um arranjo fotovoltaico de (APD – Avalanche Photodiode Detector) pode ser complementado por amplificadores de transimpedância (TIAs – Transimpedance Amplifiers) especialmente projetados, com larguras de banda e ganhos e personalizados, para converter a fotocorrente em tensão e condicionar o sinal que vai para o sistema tendo em vista o alto ganho. Isso pode maximizar o desempenho, especialmente em condições de baixa luminosidade.
Os APDs são produzidos por processos de fabricação comercial bem estabelecidos e de alta produtividade, sendo comprovados em uma ampla variedade de sistemas já na estrada.
Basicamente, quando bem feitos, eles integram desempenho comprovado a um preço atrativo. Atualmente, os detectores escolhidos para LiDAR automotivos de longo alcance, APDs são componentes críticos em vários dos sistemas de mobilidade mais avançados da atualidade.
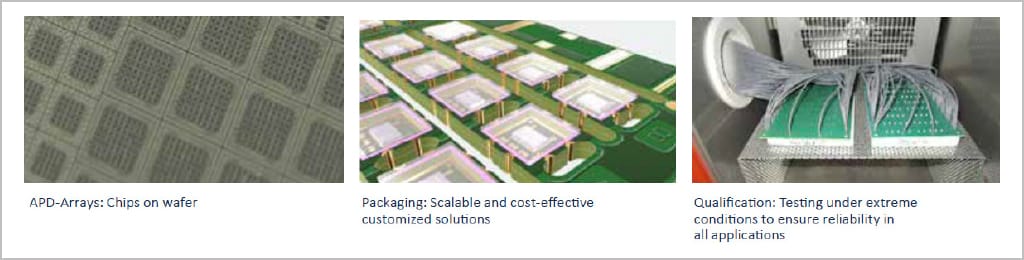
Figura 3 Detectores de fotodiodo de avalanche (APD)
Seleção do melhor fornecedor de sensor
Assim que a tecnologia de sensor certa for determinada, os designers de sistemas LiDAR continuarão enfrentando o desafio de escolher o fornecedor de sensor certo.
Os candidatos devem ser avaliados atentamente. Eles têm a tecnologia, a capacidade e o conhecimento para adaptar os sensores e os sistemas aos requisitos e aos mercados individuais de um OEM? Eles vão funcionar em estreita colaboração com a equipe OEM em design, fabricação e programação para garantir um tempo de lançamento no mercado vencedor?
Insista na experiência
Se um fornecedor de sensores precisar passar tempo acelerando desenvolvimento, fabricação, qualificação automotiva e outros processos , o OEM de mobilidade LiDAR perderá a corrida pelo tempo de lançamento mais rápido no mercado.
Os fornecedores de sensores ganham experiência fazendo o trabalho. Um bom candidato já terá aplicado a tecnologia de sensor/detector a aplicações de mobilidade. Isso pode incluir design APD padrão e personalizado, moldes, pacotes e módulos padrão e personalizados , além de engenharia e fabricação e os melhores componentes eletrônicos da categoria.
Um fornecedor ideal terá um histórico comprovado, com produtos como APDs de nível automotivo e componentes eletrônicos relacionados já em uso pelos principais OEMs LiDAR.
Avalie tendo em vista a fabricação integrada
Os designers devem priorizar um fornecedor com vantagens técnicas relevantes, como menos ruído e mais sensibilidade. Mas eles também devem procurar um fabricante de sensores que mantenha o controle holístico do domínio.
Todo o processo de produção deve ser implementado como um todo coerente, desde o processamento dos chips até a pré-fabricação dos sistemas de sensor. Fabricando todos os componentes centrais internamente, um fornecedor garante a longa disponibilidade de todos os produtos OEM para produção em série e pós-venda.
Verifique as características de personalização
Para ser bem-sucedido como um fabricante de sistemas LiDAR, é importante atingir a melhor relação custo/desempenho. Isso pode ajudar a diferenciar um determinado sistema do resto do mercado superlotado. Os sensores prontos para uso podem muito bem não caber na conta. Em vez disso, os componentes normalmente devem ser personalizados para se adequar precisamente a um designe de sistema escolhido.
Os fabricantes de sistema precisam encontrar um fornecedor de sensor que seja ágil e responsivo. Em muitos casos, um fornecedor deve trabalhar com designers OEM para personalizar o sensor e os componentes eletrônicos relacionados para a integração mais justa possível com o restante do sistema e, assim, um desempenho ideal.
Exemplos: a equipe precisa estabelecer geometrias de sensor que se encaixem em uma determinada escolha de lentes, otimizar dimensões e se adaptar às configurações de cada design óptico exclusivo. A equipe deve determinar a contagem de canais ideal, quantos sinais são recebidos em paralelo, para maximizar a resolução espacial do scanner. E ela deve personalizar o pacote para as interfaces mais curtas possíveis entre sensor e componentes eletrônicos.
Por fim, um fornecedor superior deve oferecer sensores que possuam vantagens técnicas refinadas, como homogeneidade multipixel. Se não forem homogêneos e/ou forem de origem diversa, os fotodiodos reagirão de maneira diferente à temperatura ambiente sob uso no mundo real. Isso pode diminuir significativamente o desempenho do scanner LiDAR. Por outro lado, a homogeneidade multipixel pode proporcionar a distribuição de informações de sinal mais justa possível, mesmo em distâncias de pico.
Seleção do melhor fornecedor de sensor
Um fornecedor de sensores excelente já deve conhecer as "regras da estrada". Ele deve ser experiente com a mais recente qualificação automotiva, validação de robustez, além dos padrões e das regulamentos de caracterização.
Entre os exemplos estão produção e testes com certificação automotiva ISO/TS 16949 e pacotes de arranjo fotovoltaico APD de qualidade automotiva AEC-Q 102 e 104. O fornecedor deve ser capaz de aplicar essas e outras normas relevantes a todos os componentes e instalações de fabricação, cumprir as regulamentações e ajudar OEMs de sistema a evitar responsabilização.
O aumento da regulamentação é inevitável. Os fornecedores devem demonstrar conformidade por meio das práticas recomendadas documentadas, como a rigorosa autoqualificação pioneira da Ford Motor Company no programa Q.
Procure suporte preparado para o futuro
Um fornecedor também deve demonstrar um histórico comprovado de qualidade e desempenho em termos de entrega, bem como níveis sólidos de suporte, desde o desenvolvimento inicial até o serviço de manutenção.
O design do sensor deve ser levado em conta desde o início do design do sistema. Quanto mais cedo um OEM envolver o fornecedor do sensor, mais rápido e fácil se tornará todo o processo de design/fabricação, e ainda melhor o desempenho do sistema LiDAR resultante.
Por fim, um fornecedor deve estar sempre atento aos desenvolvimentos futuros nesse campo em constante evolução. O fabricante do sensor certo terá um roteiro de inovação dos desenvolvimentos regulatórios, comerciais e tecnológicos esperados em breve, para ajudar os fabricantes de sistema a navegar nesse mercado em rápida evolução.
CONCLUSÃO
O sensor é o olho de todo sistema LiDAR. Os designers de sistema podem escolher uma dentre diversas tecnologias de sensor concorrentes. Muitos designers acham que os sensores APD provaram oferecer a melhor combinação de desempenho e preço. Os fabricantes de sistema LiDAR também devem levar em consideração uma série de fatores na escolha do fornecedor de sensores, inclusive experiência, recursos de personalização e conhecimento de qualificação automotiva. À medida que o LiDAR e outras tecnologias de mobilidade continuam evoluindo, fazer as escolhas certas de sensor marca claramente o caminho a seguir.
Autores:
Dr. Marc Schillgalies, TE Connectivity
Paul Sharman, TE Connectivity

